-
Call Now
1800-102-2727

Perpendicular axis theorem, definition, mathematical expression, necessary conditions, practice questions, FAQs

Sumit is given a planar body (say, a plate). He is told that the moment of inertia of the plate about the axis perpendicular to its plane is 200 kg cm2. He is asked if he can calculate the moment of inertia of the plate about its diametrical axis. Will Sumit be able to calculate this without touching pen-paper-calculator?
The perpendicular axis theorem is one of the most important theorems that is used for the calculation of moment of inertias of planar bodies. Since, using the integral method is time consuming and cumbersome, the theorem is developed to reduce the effort in calculation of moment of inertia provided the necessary conditions are met.
Table of contents
- Perpendicular axis theorem statement
- Mathematical expression
- Necessary condition to apply perpendicular axis theorem
- Practice questions
- FAQs
Perpendicular axis theorem
Statement: For any planar body, the moment of inertia about any of its axes that are perpendicular to the plane is equal to the sum of the moments of inertia about any two mutually perpendicular axes lying on the plane of the body, they intersect the first axis in the plane and are perpendicular to the axis as well.
Mathematical expression
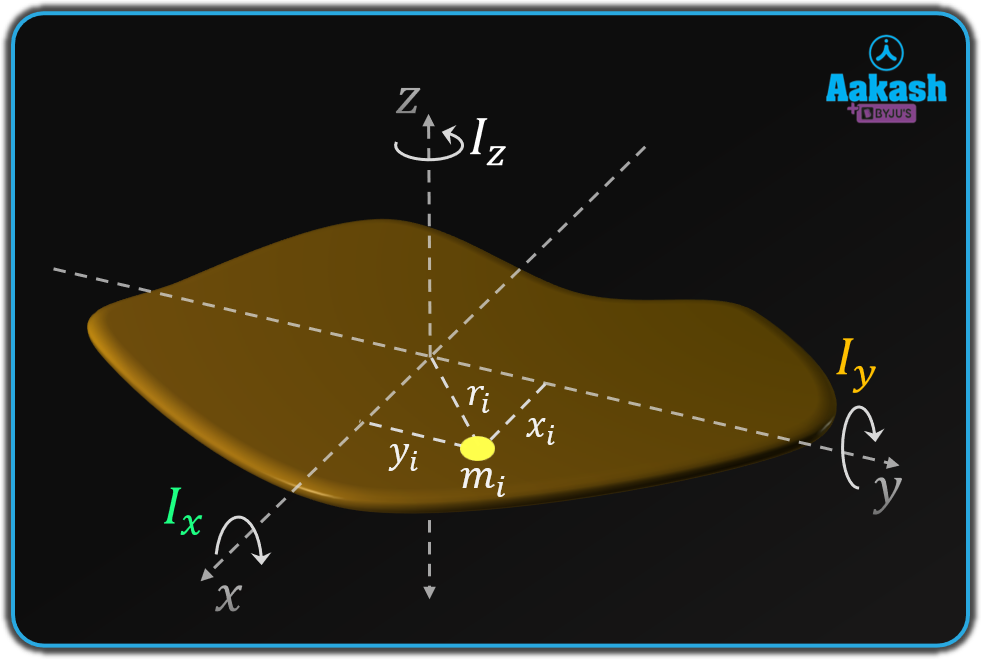
Let the x and y axes be chosen in the plane of the body and the z-axis be perpendicular to this
plane. The three axes are mutually perpendicular. According to the perpendicular axis theorem :
Iz = Ix + Iy
This theorem is applicable only for planar objects like circular disc, ring, plane lamina, etc.
However
So,
Note:
The point of intersection can be any point in the plane of the body, which lies on the body or even outside it.
The three axes need not be at the centre of the body.
Necessary condition to apply perpendicular axis theorem
- The body must be planar in nature. This is not applicable for the objects having significant dimensions in all the three dimensions.
- The two axes must lie in the major plane of the body and the third axis must be perpendicular to the plane of the body (i.e. perpendicular to those axes as well).
- All the axes must be mutually perpendicular.
Practice problems
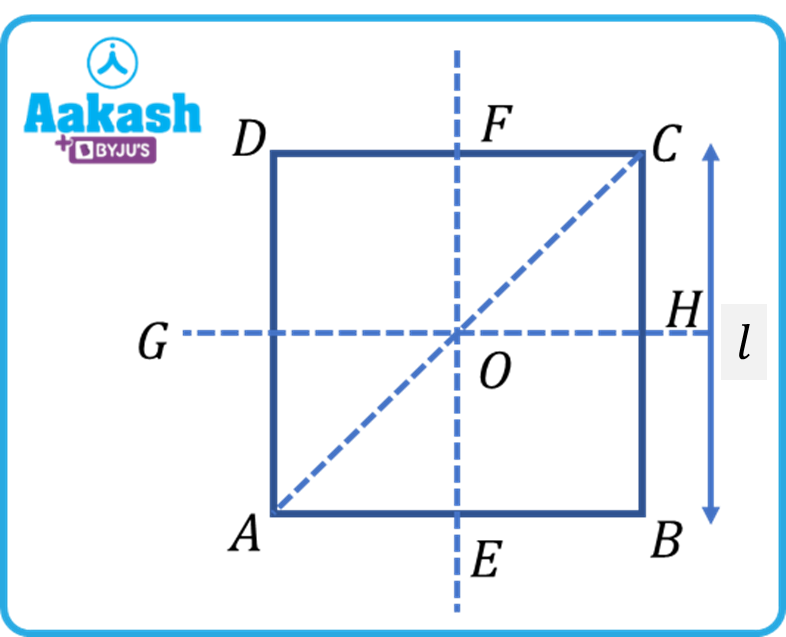
Q1. For the given uniform square lamina ABCD of side length l, whose centre is O, identify the correct option.
A) 
B) 
C) 
D) 
A. (c)
The moment of inertia about an axis perpendicular to the plane of a square lamina of side l and passing through its centre O,
The axis GH and EF are perpendicular, hence by perpendicular axis theorem,
IEF = IGH due to symmetry of square plate


As it is a square shaped planar lamina, the diagonal axes BD and AC are also mutually perpendicular to each other and the axis through O is perpendicular to the plane of the plate. Hence by perpendicular axis theorem,
Io = IAC + IBD
We can say,  due to the symmetry of the square plate.
due to the symmetry of the square plate.


From Eq.

Q2. A uniform rectangular lamina is shown in figure. Find the moment of inertia Icom about the z axis which passes through its centre and perpendicular to its plane. Here b = 10 m, l = 20 m and M = 12 kg.
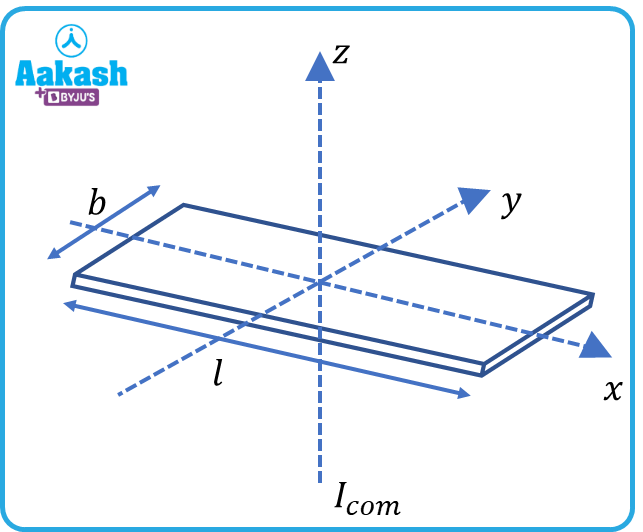
A. For a rectangular lamina, the moment of inertia about an axis passing through its COM and perpendicular to the plane of lamina is given by:


So, 
Putting the given values,


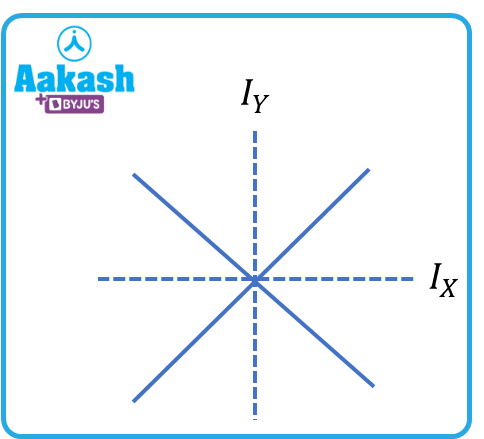
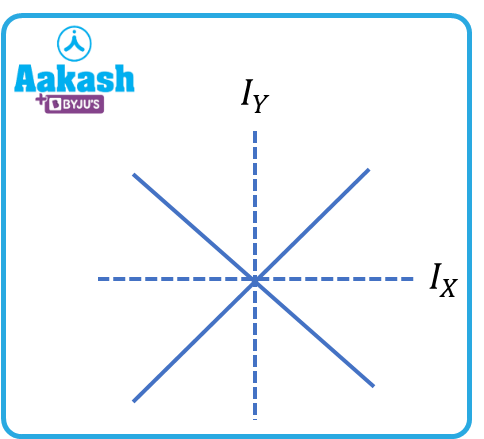
Q3. Two uniform identical rods each of mass M and length L are arranged as shown in the figure. Find the moment of inertia of the cross about a bisector in the plane of rods as shown by the dotted line in the figure.
A. Length of the rod =L
Mass of the rod =M
As we know that, IZ of a rod is given as
So, moment of inertia of the two rods shown will be 2IZ, which is
Now, using the perpendicular axis theorem,
IZ = Ix + Iy
and due to symmetry, Ix = Iy

Or 
Hence, moment of inertia of the cross about the bisector will be

Q4. A ring of mass M and radius R has an axis passing through the ring diametrically. If the moment of inertia about the axis passing through its centre of mass and perpendicular to the plane is MR2, then find the moment of inertia about the axis passing diametrically.
A. Given, moment of inertia of the ring about the axis passing through the centre of mass and perpendicular to its plane is IZ = MR2.
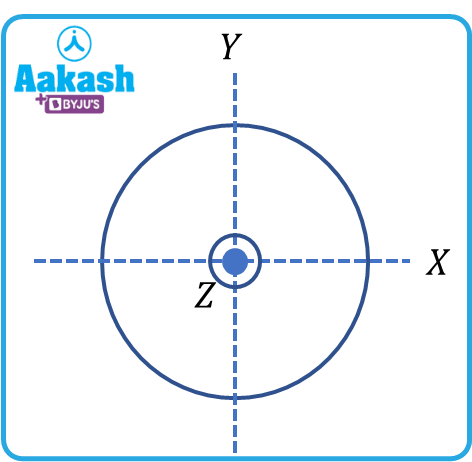
Now, moment of inertia of ring about the axis passing along its diameter is given by IX or IY
Using perpendicular axis theorem we have

and due to symmetry, 


FAQs
Q1. ABCD is a square plate with centre O. The moment of inertia of the plate about the axes 1,2,3 and 4 are I1, I2, I3, I4 respectively. What will be the relation between these four moments of inertia.
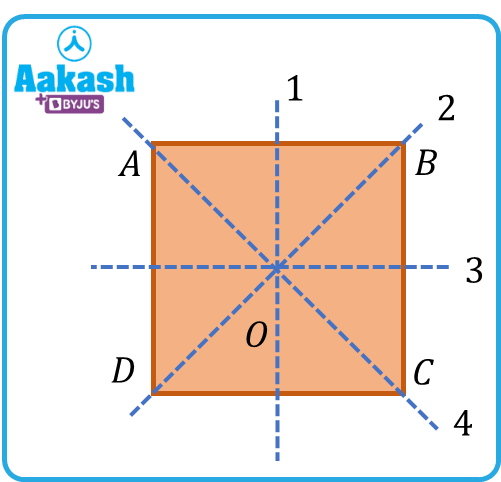
A. According to theorem of perpendicular axes, moment of inertia of the plate about an axis passing through the centre O and perpendicular to the plane is,
Io = I1 + I3 = I2 + I4
(Since, the diagonals in a square are mutually perpendicular to each other)
Additionally,
I1 = I3 = I2 = I4
This is because the moment of inertia about these axes are the same because of symmetry.
Q2. What are the applications of the perpendicular axis theorem?
A. The perpendicular axis theorem is very much useful in calculating the moment of inertia for a planar body of complex shapes whose moment of inertia about two mutually perpendicular axes lying on the plane is known. In that case, we don’t have to calculate the moment of inertia by , we can just add the moment of inertia about the axes lying in the plane.
Q3. Will the radius of gyration for a planar body be universally fixed?
A. The radius of gyration is all about the rotational dynamics of a body. The radius of gyration about the axis of rotation can be defined as the radial distance of a point which would have the same moment of inertia as the body's actual distribution of mass, if the total mass of the body is assumed to be concentrated there. In the case of a body the inertia is dependent on the axis of rotation we chose. Further is the distribution of mass from the axis of rotation, more is the inertia. So a 3D body which is not the same in terms of the radial distribution of mass, the moment of inertia will change according to the axis we choose.
A body having the moment of inertia, I , radius of gyration k and mass, m we can say, I = mk2
As I does not remain the same, the radius of gyration, k also changes with the change in axis we chose.
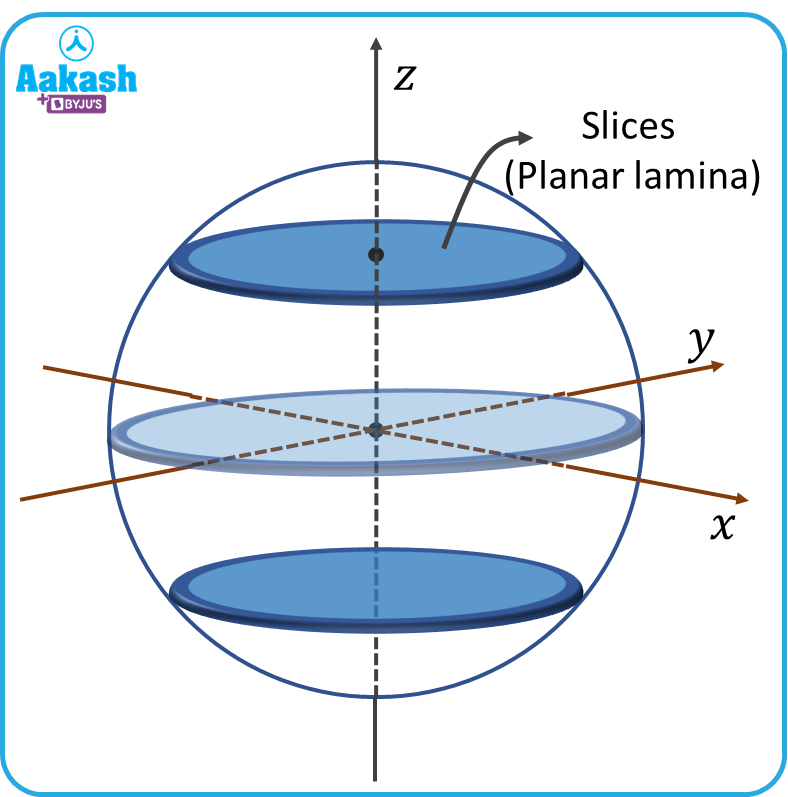
Q4. Can we apply the perpendicular axis theorem to a 3D body?
A. For a 3D object, we can consider it is made of slices that are all laminar in nature. We can apply the parallel axis theorem independently for each lamina. It does not apply for all of them together i.e., for the whole 3D object. It is because although the laminas have the same z axis, they do not necessarily have the same x and y axes. So we cannot simply add the moments of inertia (MOI) for the x and y axes for every lamina. The x and y axes for each lamina are parallel to each other but they are off-set from each other and from the x, y axes which we are using for the 3D object.