-
Call Now
1800-102-2727

Dynamics of rotational motion about a fixed axis, energy, work, power, practice problems, FAQs

You might be aware about how water falling on a turbine generates electricity. But have you ever thought how we can measure the work done or power developed by the same turbine? For such calculations one should study the dynamics of rotational motion about fixed axes.
Table of contents
- Pure Rotational Motion
- Energy in rotational motion
- Work done and Power of a Rotating Body
- Work-Energy Theorem
- Analogy between Translational and Rotational Motion Parameters
- Practice problems
- FAQs
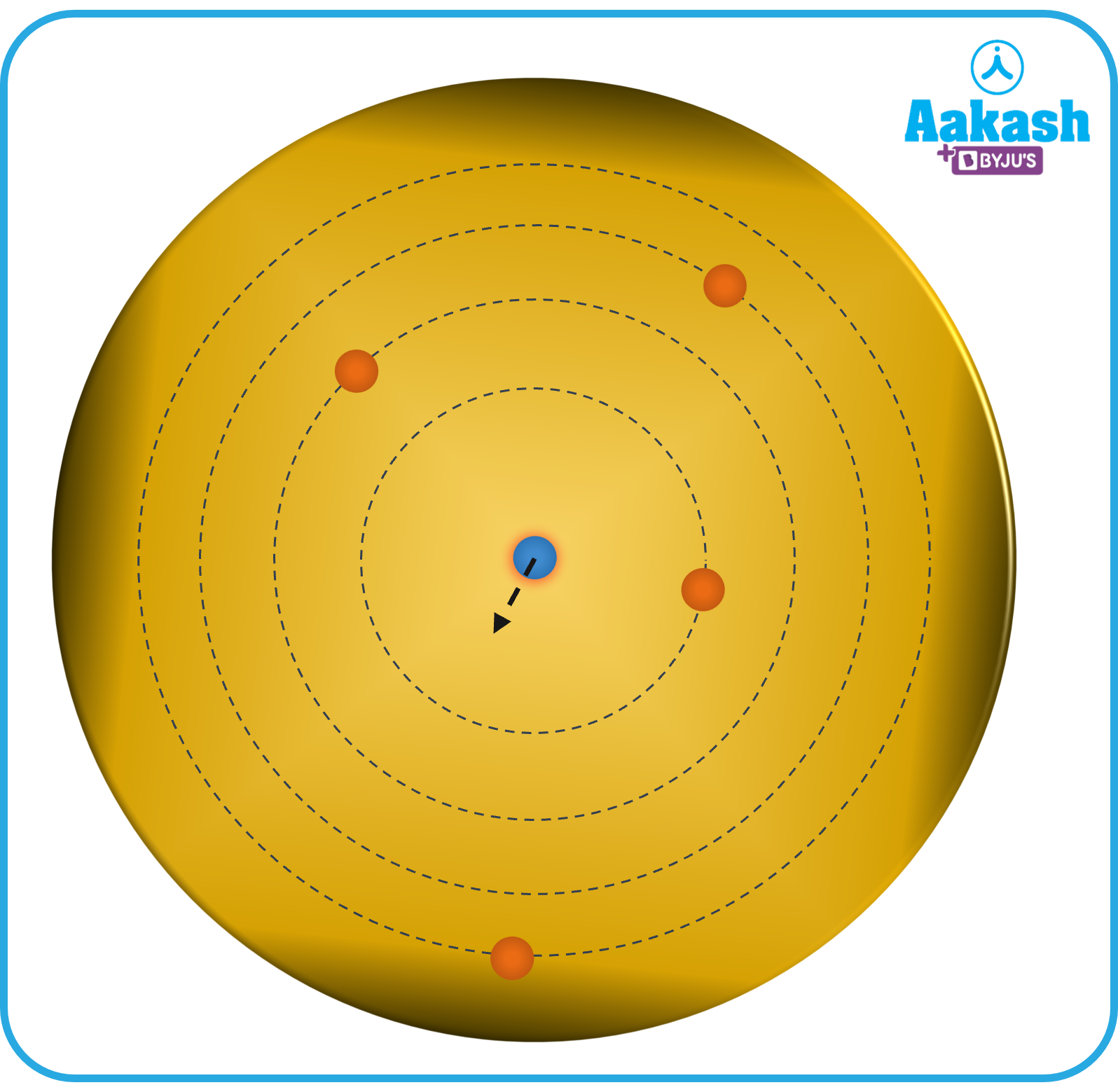
Pure Rotational Motion
- In a pure rotational motion, a rigid body rotates about a fixed axis known as the axis of rotation.
- Every point of the body moves in a circular motion whose centre lies on the axis of rotation.
- Every particle moves with a different linear velocity as vt= r⍵
- All the particles on the axis of rotation will remain stationary.
- Every point moves through the same angle during a particular interval of time.
Vector relation between angular and linear variables
Linear velocity = Radius x Angular velocity
Tangential acceleration = Radius x Angular acceleration
Radial acceleration = Linear velocity x Angular velocity
Energy in rotational motion
Let us say that a body is rotating with some angular velocity![]() about a fixed axis with some kinetic energy.
about a fixed axis with some kinetic energy.
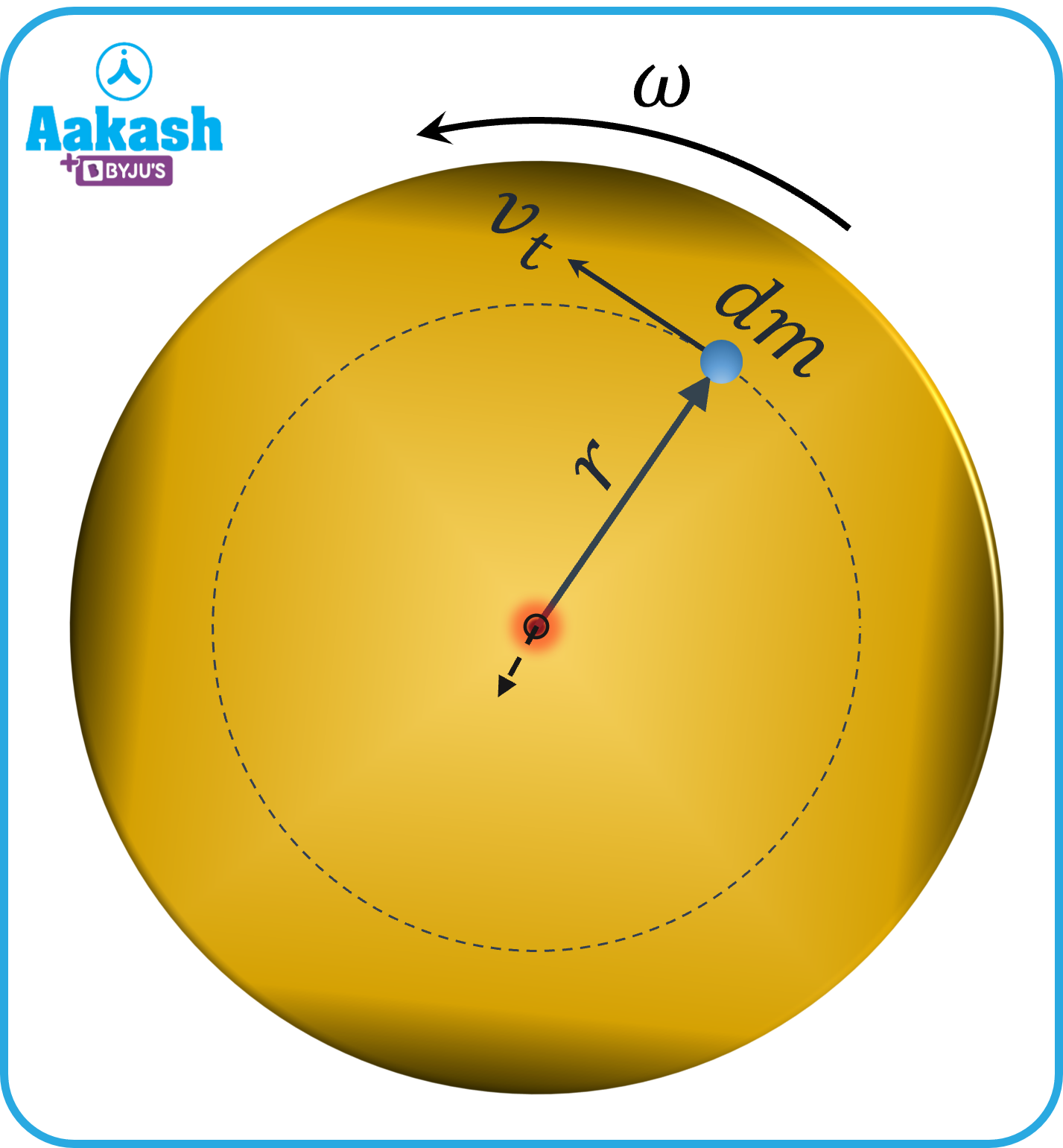
Consider a point on the rotating body at a distance r from the axis of rotation having mass dm and moving with a linear velocity vt.
The magnitude of linear velocity is,
So,
In this case,
Since
This is equivalent to the kinetic energy in linear motion
Work done and Power of a Rotating Body
Work done in a translational motion
Let us consider an example where a man is pulling a block with a constant force F.
Let the displacement of the block be s.
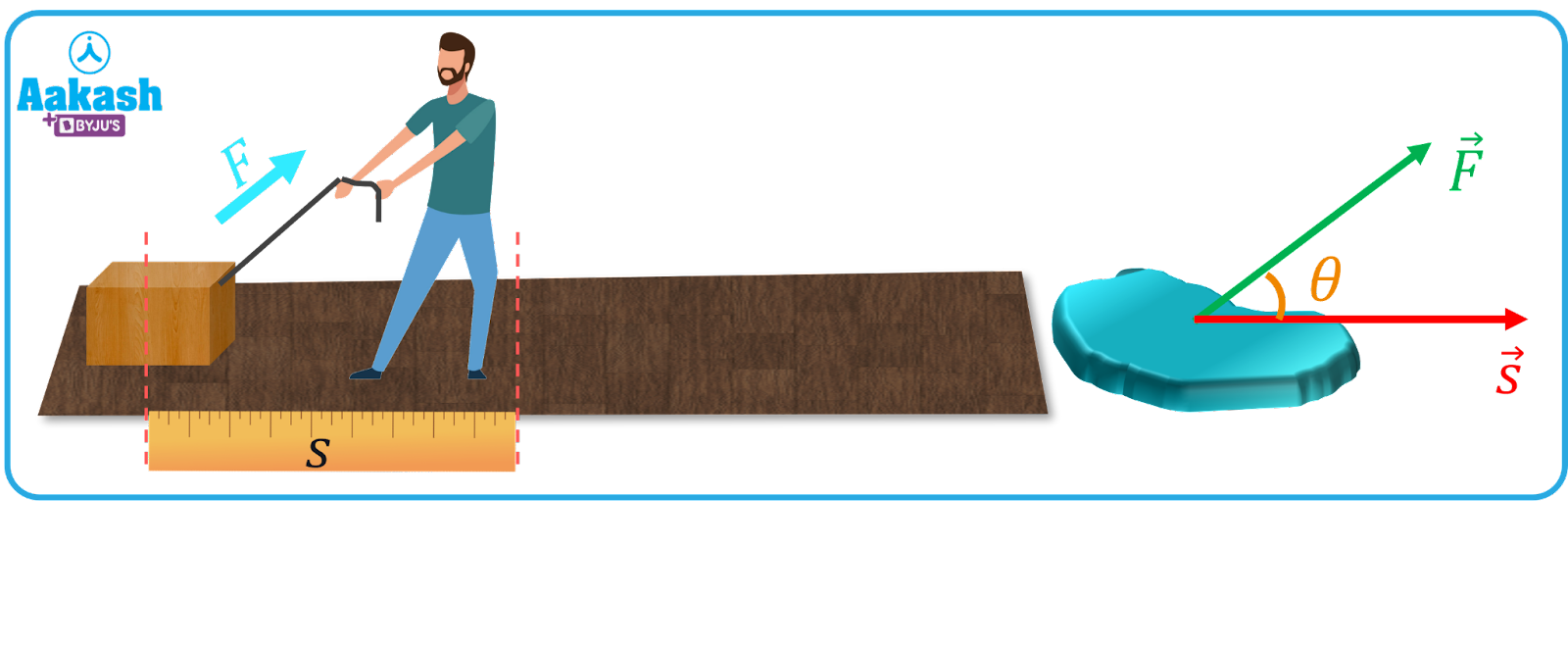
In the case of linear motion, the work done by the constant force is given by the dot product of force and displacement.
Work done in rotational motion
Let us say that a rigid body has rotated through an angle dθ under the influence of force F.
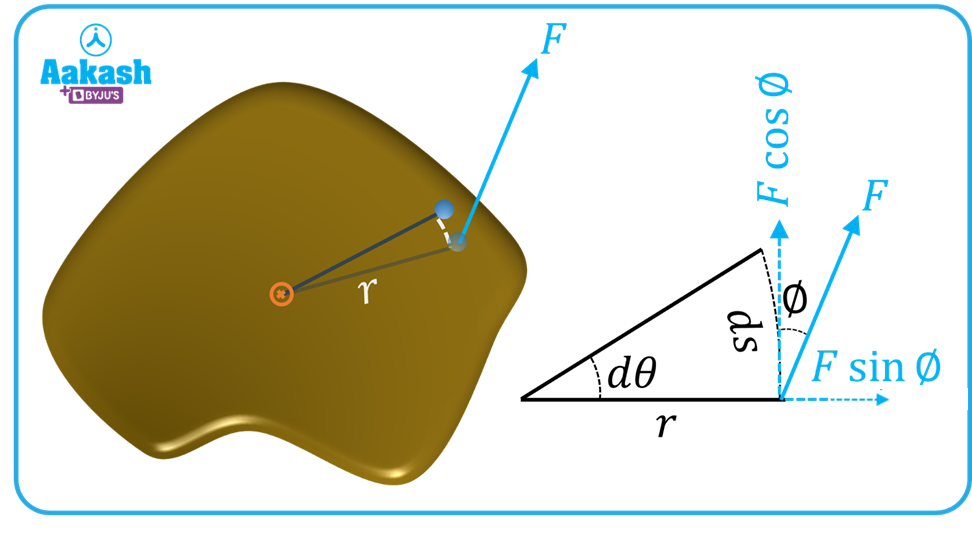
The total work done is as follows
The total work done in rotating a body can be considered as the sum of all the torques integrated over the angle through which the body rotates.
Power
Power can be defined as the rate of change of work done.
Work-Energy Theorem
The work-energy theorem for rotation states that the amount of work done by all the torques acting on a rigid body about a fixed axis of rotation is equal to the change in the rotational kinetic energy of the object.
As we know,
Analogy between Translational and Rotational Motion Parameters
|
Type of motion |
Kinetic energy |
Work done |
Power |
|
Rotational |
|
. |
|
|
Translational |
F.v |
Practice problems
Q. A flywheel rotating about a fixed axis has a kinetic energy of 360 J when its angular speed is 30 rad s-1. What is the moment of inertia of the wheel about the axis of rotation?
- 0.6 kg m2
- 0.15 kg m2
- 0.8 kg m2
- 0.75 kg m2
Solution:
As the wheel is rotating about a fixed axis, it will only have rotational kinetic energy.
Given,
Thus, option (C) is the correct answer.
Question: Two bodies have their moments of inertia I and 2I, respectively, about their axes of rotation. If their rotational kinetic energies are equal, then what will be the ratio of their angular velocities?
- 2 : 1
- 1 : 2
- 2: 1
- 1 : 2
Solution:
For these two bodies,
I1=I, I2=2I
Thus, option (C) is the correct answer.
Q. The pulley (radius r ) shown in the figure has a moment of inertia I about its axis. Calculate the magnitude of acceleration of the two blocks just after the system is released from rest. (Assume that the string is light and does not slip on the pulley.)
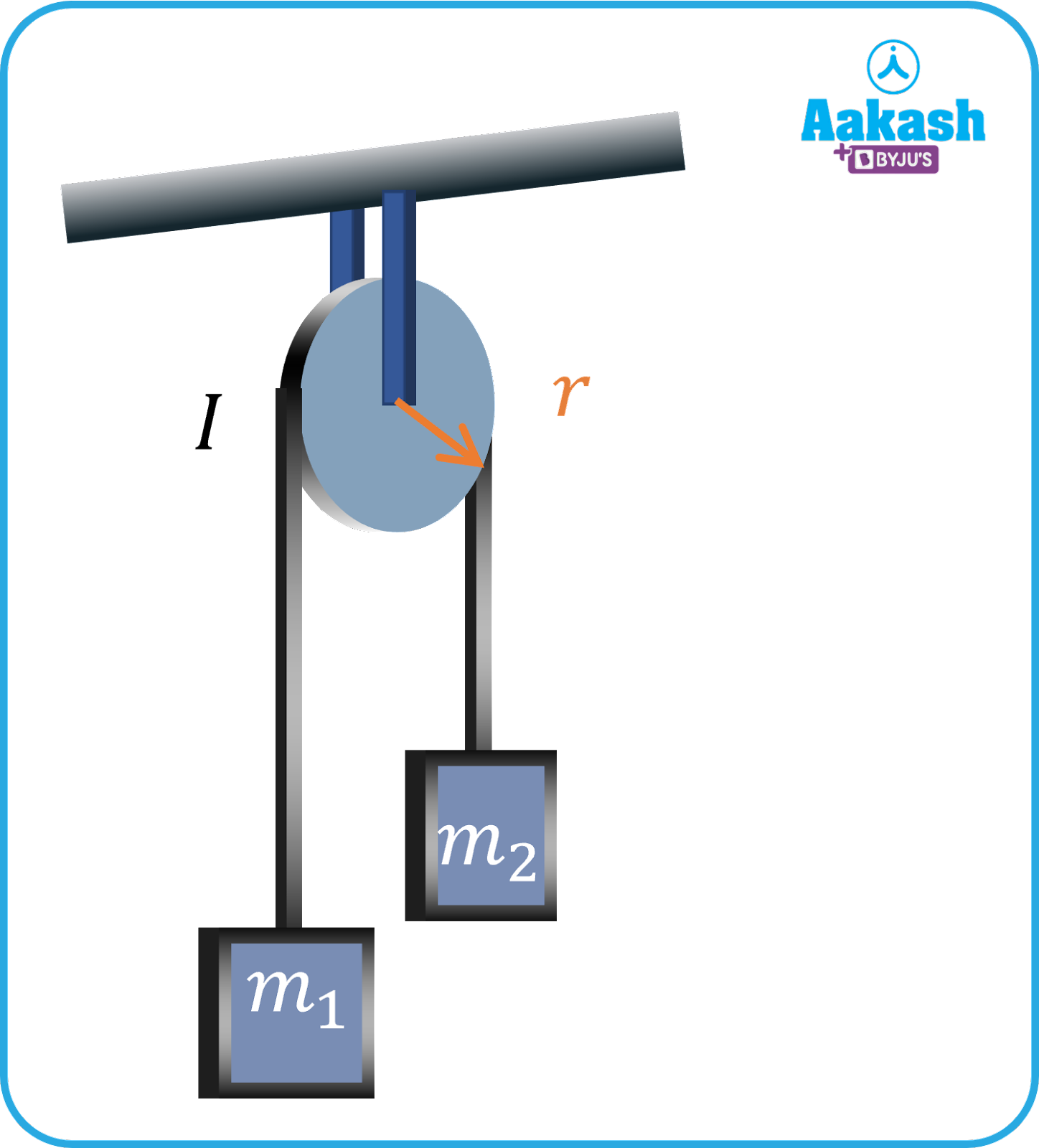
A.
Let m1 > m2
When the system is released from rest, m1 moves downwards and m2 moves upwards. Let a and v be the acceleration and velocity of the masses. Let 𝛼 and 𝜔 be the angular acceleration and velocity of the pulley at an instant.
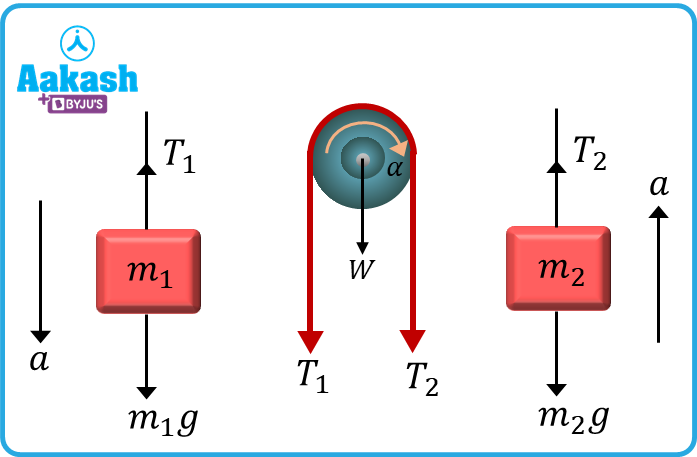
The FBD of blocks and pulley are shown in the figure.
From the FBD of block m1,
From the FBD of block m2,
From the FBD of pulley,
Adding equations (i), (ii) and (iii),
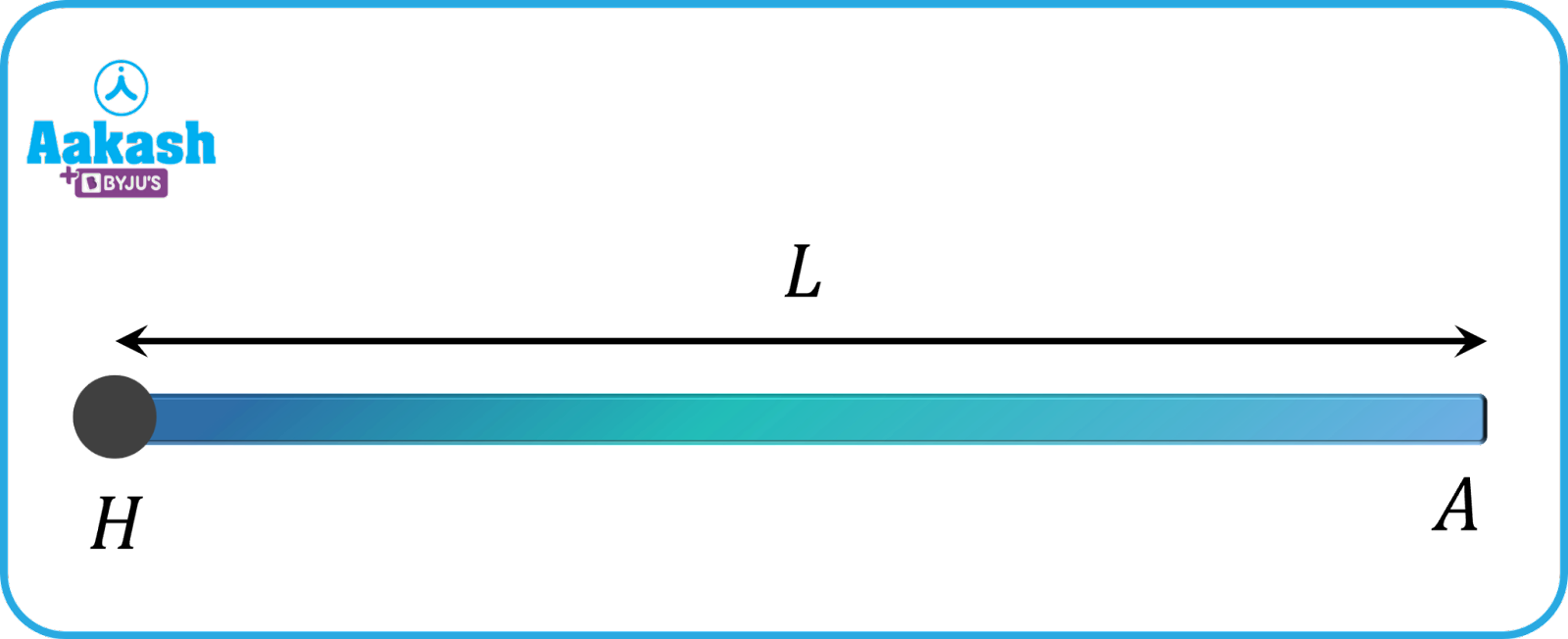
Q. A uniform rod of mass M and length L can rotate in a vertical plane about a smooth horizontal axis hinged at point H. Find the net hinge force acting at this moment.
Solution:
As the rod is released from rest, the initial angular velocity is zero (𝜔 = 0).
When the rod is released, the weight (Mg) is acting at midpoint (L/2 length) of the rod. The torque about the hinge point can be written as follows:
[∵Moment of inertia of rod about one end is
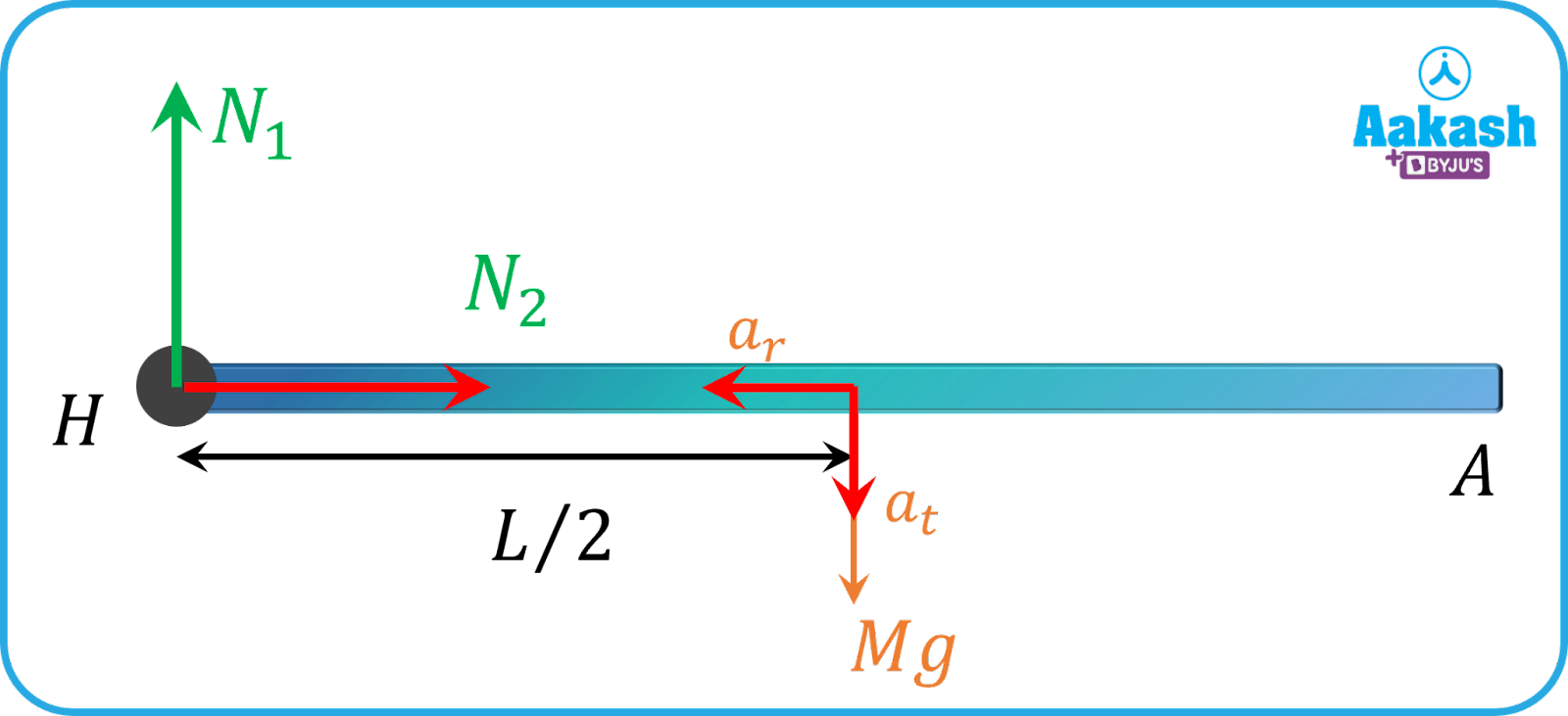
As the rod is performing a vertical circular motion, it will have both radial and tangential acceleration. Since the motion is happening in the vertical plane, hinge forces in this plane could be in any direction. Since the direction of the resultant force is unknown, we are choosing its components (N1 and N2) along the direction of radial and tangential acceleration.
Along the tangential direction,
Substituting the value of from equation (i), we get the following:
Similarly,
Along the radial direction,
As =0, we get
N2=0
Net hinge force,
Since the direction of N1 is upwards, the resultant hinge force is also directed upwards.
FAQs
Q. Which equation in rotational motion is similar to Newton’s second law for linear motion i.e. F=ma?
A. The equation in rotational motion which is similar to Newton’s second law for linear motion i.e.
Q. Which quantity do you think would change if the axis is not fixed but moving?
A. If the axis is not fixed, inertia of the body under consideration will change and consequently all the properties that depend upon the inertia will change.
Q. In the absence of external torque, which quantity remains conserved?
A. In the absence of external torque Angular momentum remains conserved.
Q. If a rigid body is rotating about a moving axis, how many types of motions is it performing?
A. If a rigid body is rotating about a moving axis, it is performing two types of motions, rotational and translational.