-
Call Now
1800-102-2727

Parallel axis theorem, derivation, practice problems, FAQs

Using the conventional integral method to find the moment of inertia of a body about an axis parallel to the axis passing through the centre of mass is quite tedious. Thus to tackle such problems, some theorems are developed that are applicable under certain conditions but prove to be very effective. One such theorem is the parallel axis theorem which will be discussed here.
Table of contents
- Parallel Axis Theorem
- Derivation for parallel axis theorem
- Points to remember
- Practice problems
- FAQs
Parallel Axis Theorem

The moment of inertia of a body about an axis parallel to a centroidal axis and separated by perpendicular distance 𝑑 is given by
Or
Where,
(Isys)YY’ is the moment of inertia of the system about an axis YY’.
(Isys)com is the moment of inertia of the system about an axis passing through the centre of mass and parallel to YY’.
Derivation for parallel axis theorem
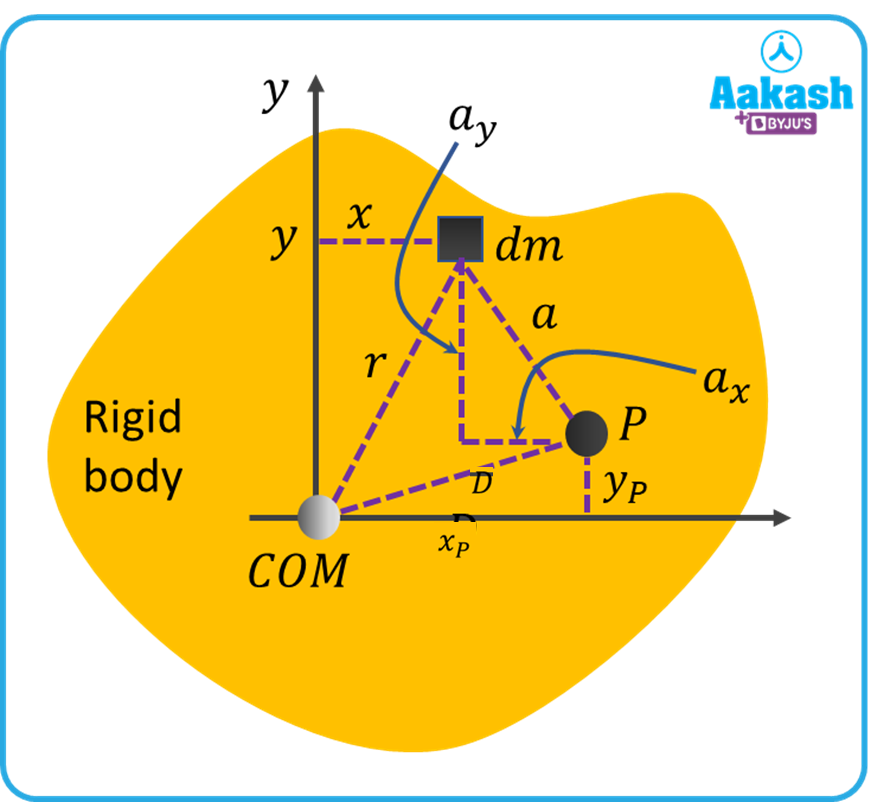
The figure above shows a rigid body of mass M having centre of mass at origin denoted by COM. Suppose that we need to find the moment of inertia about the axis passing through point P and perpendicular to the plane. Consider a small element having mass dm at distance r from the origin. The other distances are as shown in the image.
Now, moment of inertia of elemental mass about axis passing through COM,
Similarly, MOI about axis passing through point P,
From the image,
Also
Similarly, ay=y-yP
Putting in equation (i),
Now the elemental mass can be at different points but the position of the axis remains the same. Therefore xP and yP remains constant.
Since centre of mass is located at origin, therefore xdm=0 and ydm=0
Thus equation becomes,
Points to remember
- Parallel axis theorem is applicable for any type of body.
- To apply the parallel axis theorem, the axis has to be parallel, not skew.
Practice problems
Q. A hollow cubical box is having mass M and side a. What will be the moment of inertia of the box about an axis passing through the centres of two opposite faces?
A.The hollow cubical box can be assumed to be an arrangement of 6 identical square plates each having mass m and side a
Assume each plate of mass m.
Hence M=6m
Moment of inertia of square plate (perpendicular to its plane) about axis through COM is ma26
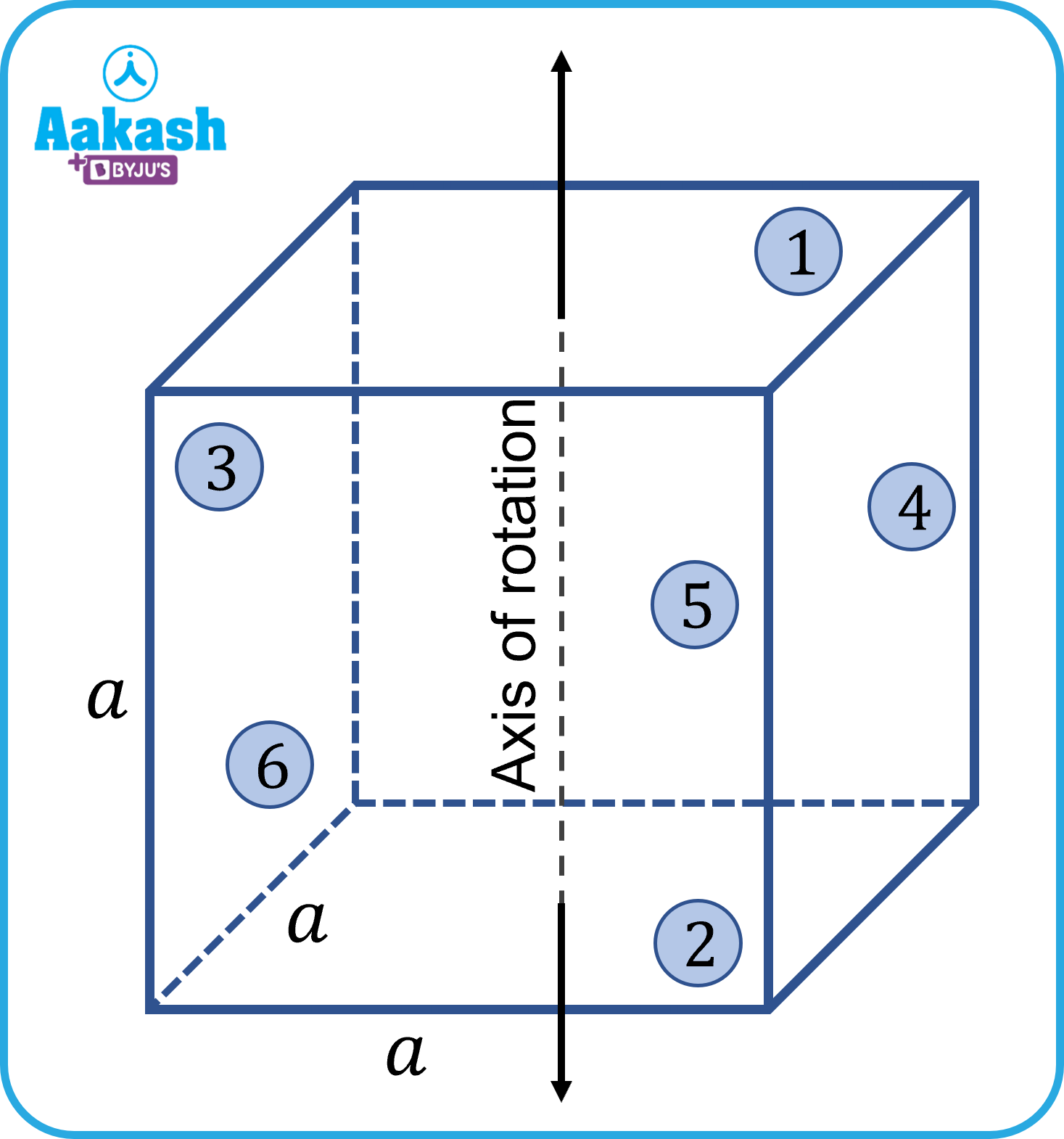
Axis of rotation passes through the centre of mass of two square plates (1) and (2) facing opposite to each other.
Therefore,
MOI of a square plate about axis passing through COM and parallel to its plane is
and the remaining 4 plates have a distance of a2 from the cube axis.
MOI of plate (3), (4), (5) and (6) about cube axis by parallel axis theorem is
Therefore, total MOI about cube axis is
Here,
Hence,
Q. From a uniform mass density disc having radius 2R a disc having diameter 2R is removed as shown in the figure. The moments of inertia of this lamina about an axis passing through O and P and perpendicular to the plane of disc are Io and IP respectively. Find the ratio IPIO.
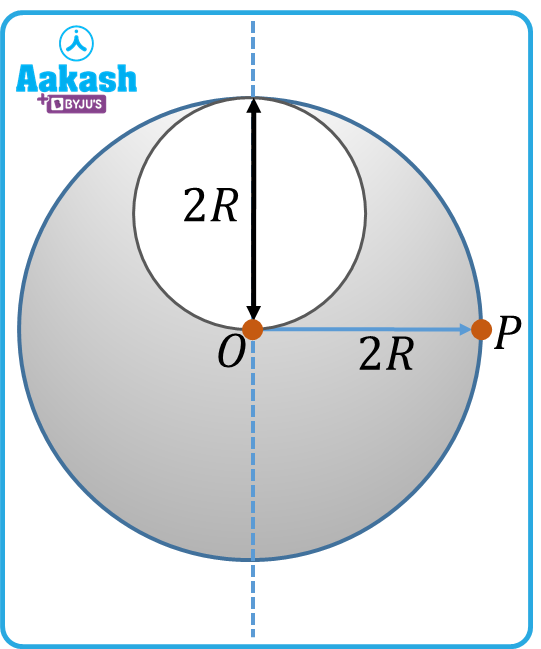
A.Assume the mass of bigger disc is M
Hence, mass of removed disc is m
Since disc has uniform mass density,
M=4m ..........(1)
MOI about point O for bigger disc
MOI about point O for removed disc (applying parallel axis theorem)
Hence
(-ve because we removed that portion)
MOI about point P for bigger disc =M(2R)22+M(2R)2=6MR2
Distance between point P and centre of removed disc is
MOI about point P for removed disc
Hence {-ve because we removed that portion}
Q. Figure below shows a system of solid discs, each having mass M and radius R.
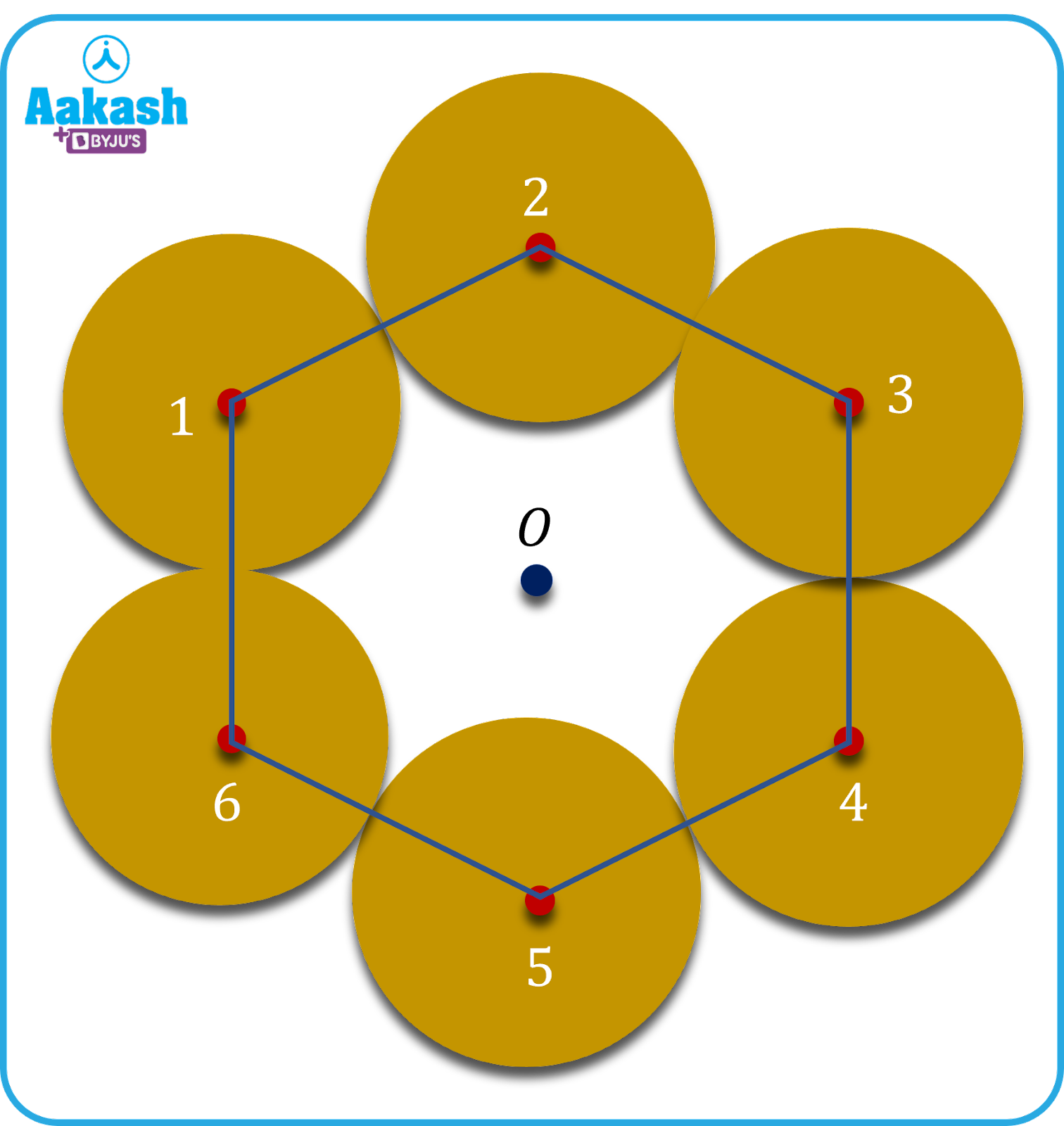
What will be the moment of inertia about an axis perpendicular to the plane and passing through point O?
A.This is a regular hexagon made by joining all the disc centres whose every edge is equal to 2R.
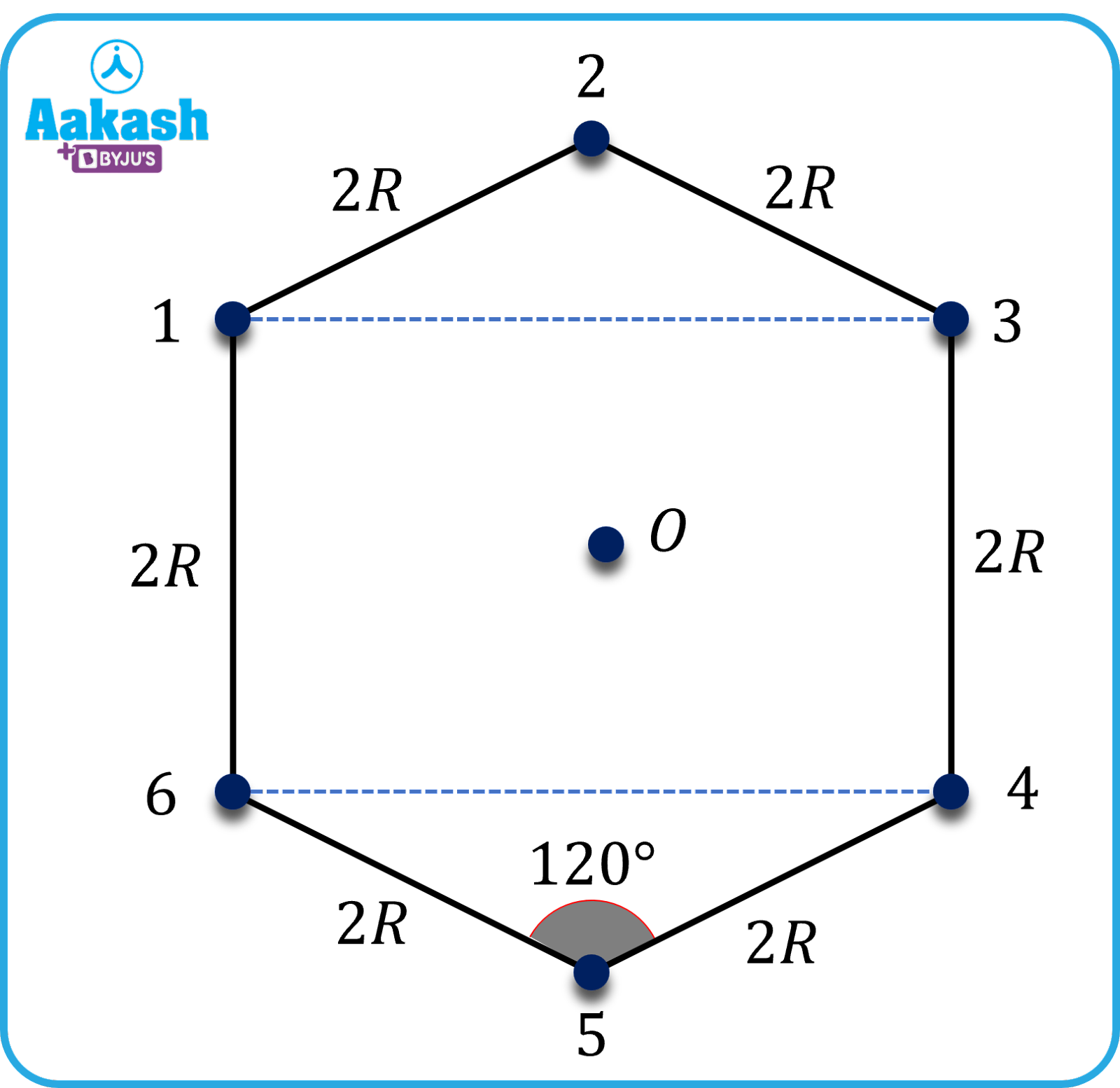
The moment of inertia of solid disc about its centre and perpendicular to its plane is
Here, the distance of each of the points from point O is 2R. Hence MOI will be the same for all the discs about point O.
Therefore,
Q. The moment of inertia of a rod of length l about an axis passing through its centre of mass and perpendicular to the rod is I. A hexagonal shape is formed by six such rods by connecting them end to end. What will be the moment of inertia about an axis passing through the centre of the hexagon and perpendicular to its plane?
A.
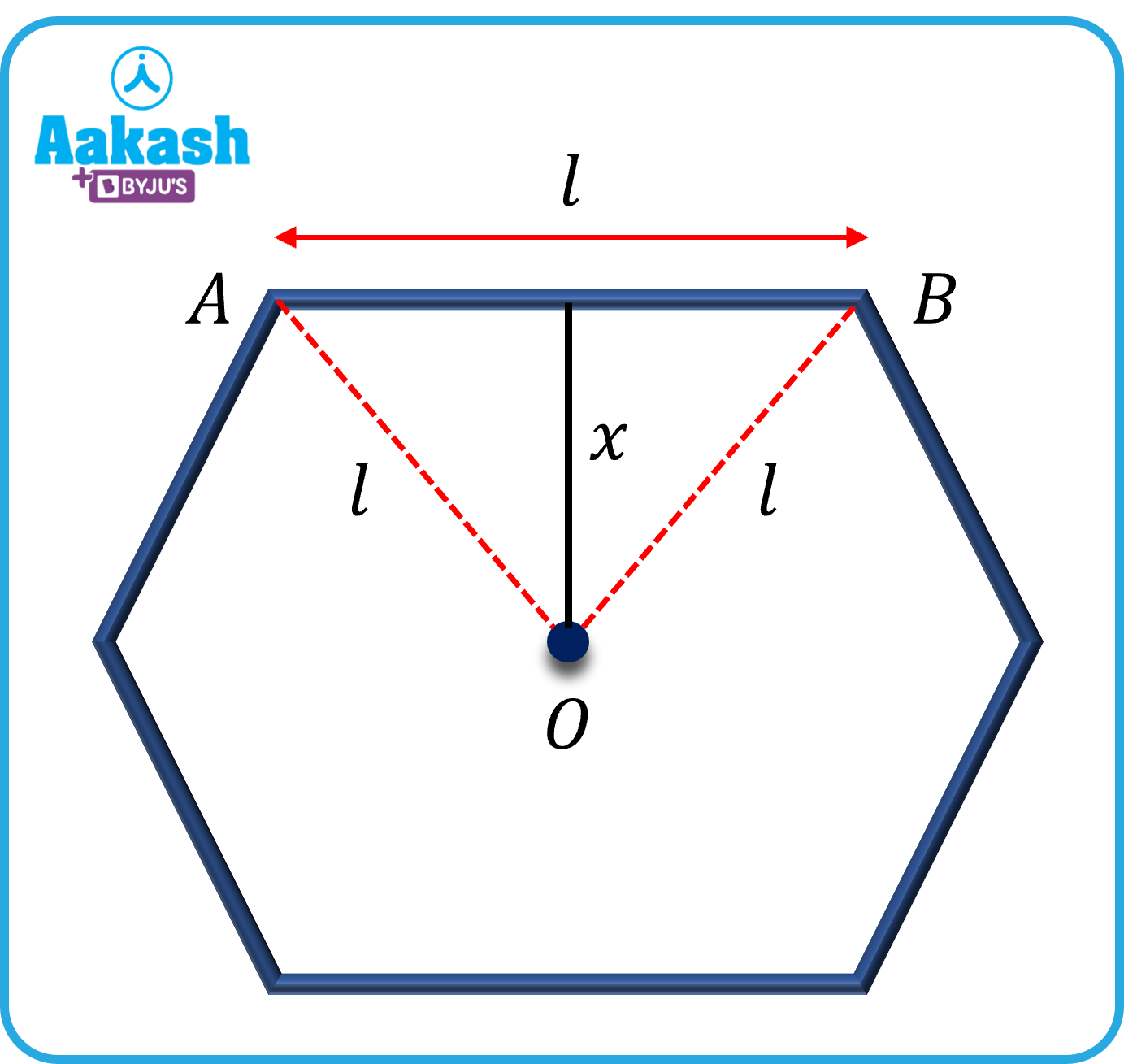
Moment of inertia of rod AB about its centre and perpendicular to the length,
Moment of inertia of the rod perpendicular to the plane of hexagon about the axis passing through O,
[From the theorem of parallel axes]
From figure,
So, total moment of inertia of system,
FAQs
Q. What are the two theorems associated with Moment of inertia?A. The two theorems associated with finding the moment of inertia are parallel axis theorem and perpendicular axis theorem. Parallel axis theorem applies for 3D objects like spheres as well, but perpendicular axis theorem is limited to planar bodies like discs or rings.
Q. How do you use the parallel axis theorem?
A. The moment of inertia about an unknown axis is equal to the sum of the moment of inertia about the centre of mass and the product of the mass and the square of the distance between the two axes. The two axes should be parallel.
Q. Can the radius of gyration be zero?
A. The radius of gyration can be defined as the square root of the average of the squares of distances of the particles from the centre of mass. Since the particles are all located at non-zero distances, the radius of gyration can never be zero.
Q. What are the three types of moment of inertia?
A. The three types of moment of inertia are–mass moment of inertia, area moment of inertia and polar moment of inertia. Mass moment of inertia refers to the resistance offered by a body due to rotation about its own axis of rotation. Area moment of inertia refers to the resistance offered by it during bending. Polar moment of inertia refers to the resistance offered during torsion or twisting.