-
Call Now
1800-102-2727

Equilibrium of a rigid body - types of equilibrium, practice problems, FAQs

Ever wondered what makes a stationary object stationary. Why does a bridge stay stationary or a parked car stay where it is? It may seem obvious but there are conditions that need to be met for static equilibrium of such bodies which we are gonna discuss here.
Table of contents
- Equilibrium of a rigid body
- Types of Equilibrium
- Practice problems
- FAQs
Equilibrium of a rigid body
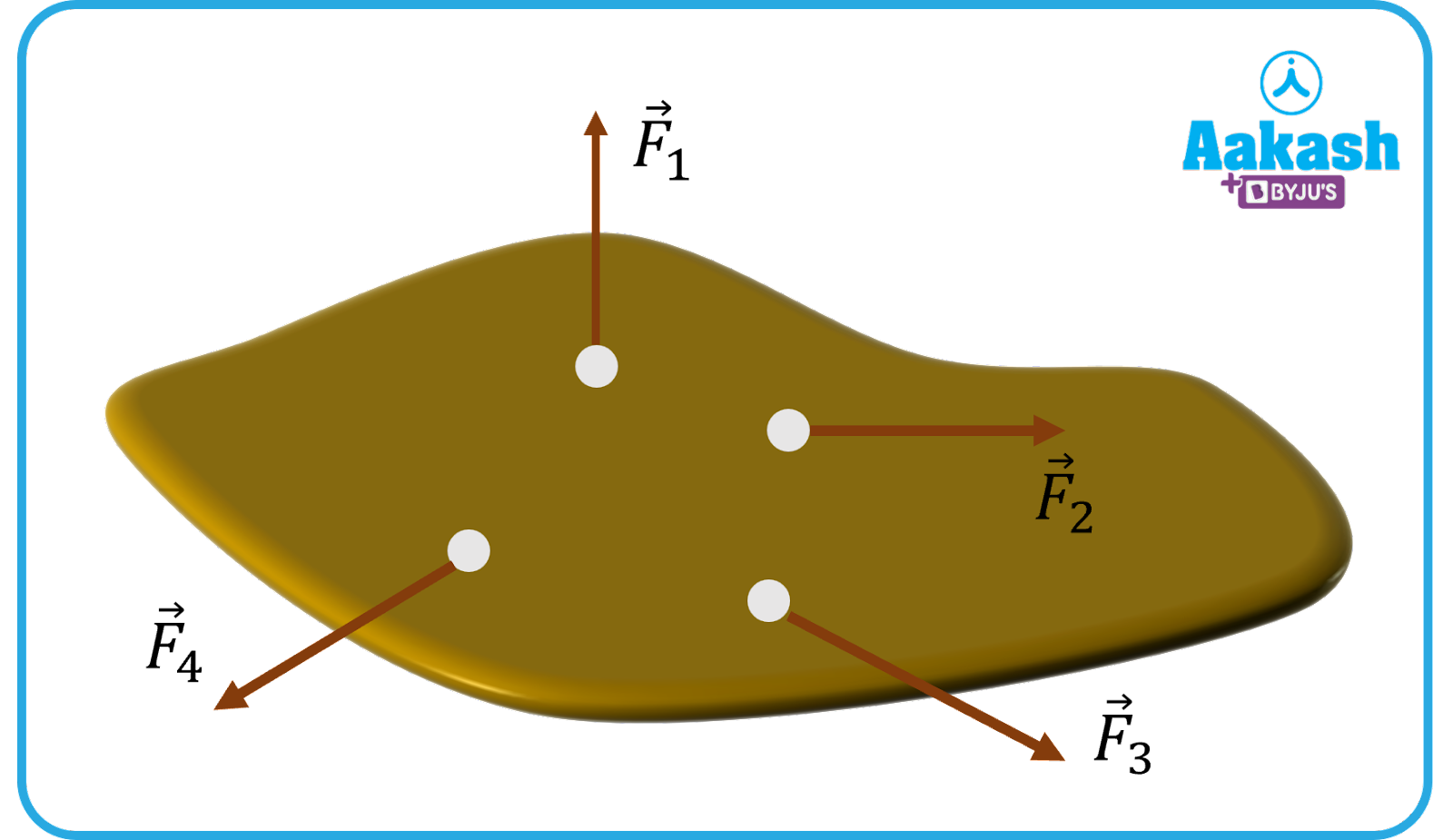
An object is said to be in translational equilibrium if the summation of all the forces acting on the body is zero.
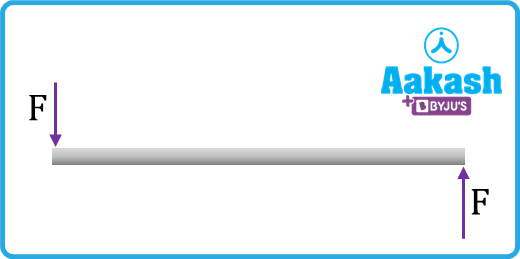
For a body to be in rotational equilibrium, the summation of all the torques acting on the body should be zero.
A body is said to be in mechanical equilibrium only if the body satisfies the conditions of both the translational and rotational equilibria.
Types of Equilibrium
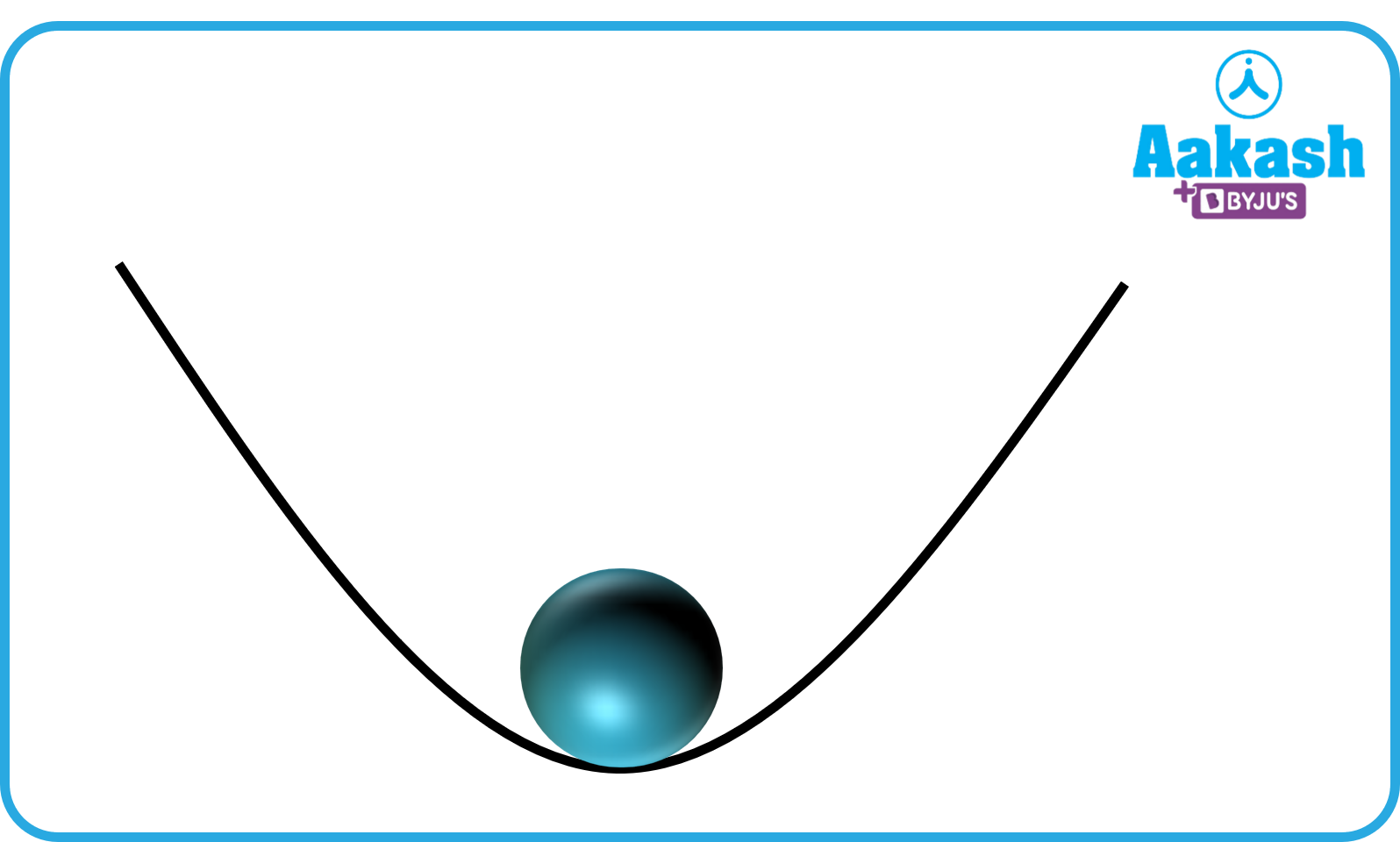
Stable equilibrium
A body is said to be in a stable equilibrium position if the body tries to regain its equilibrium position after being slightly displaced.
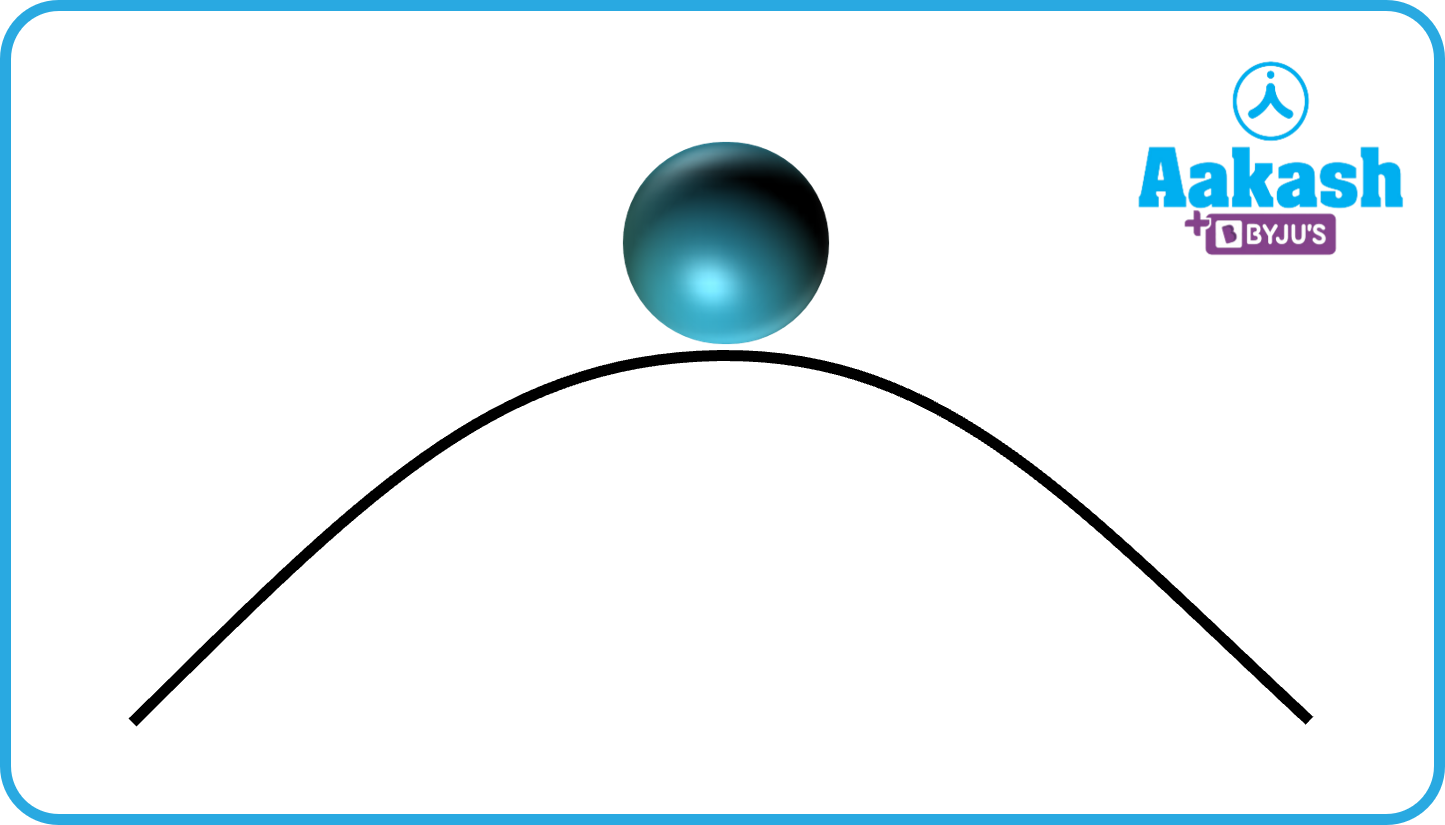
Unstable equilibrium
A body is said to be in unstable equilibrium if the body gets permanently displaced after being slightly disturbed.
Neutral equilibrium
A body is said to be in neutral equilibrium if the body can stay in equilibrium even after being slightly displaced.
Practice problems
Q1. Two small kids weighing 10 kg and 15 kg are trying to balance a seesaw of total length 5.0 m with the fulcrum at the centre. If one of the kids is sitting at one end, where should the other sit to keep the seesaw in equilibrium?
Answer. Let other kid sit at a distance x from the fulcrum.
Seesaw will be in rotational equilibrium when kept horizontal. Therefore applying the rotational equilibrium condition,
Torque due to kid of mass 15 kg = Torque due to kid of mass 10 kg
Therefore the kid should sit at a distance of 1.7 m from the fulcrum.
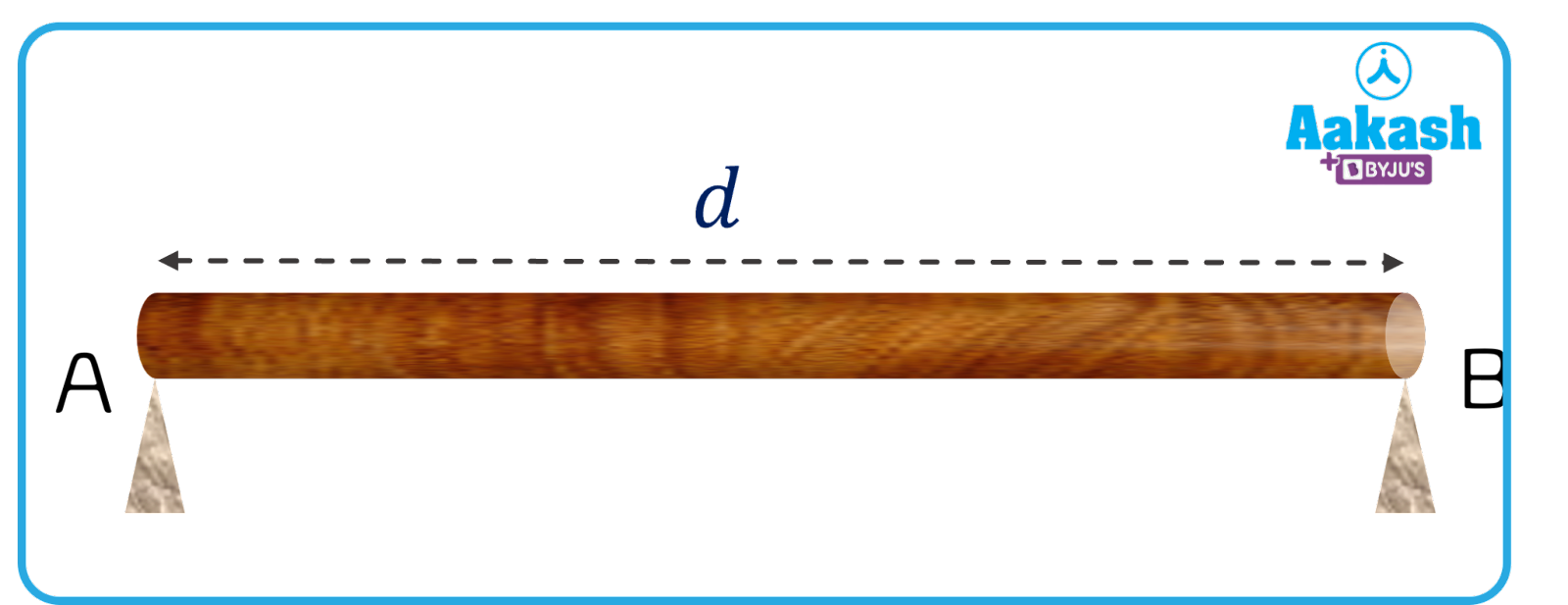
Q2 A rod of weight W is supported by two parallel knife edges, A and B, and is in equilibrium in a horizontal position. The knives are at distance d from each other. The centre of mass of the rod is at distance x from point A. What is the normal reaction at point A?
A.
B.
C.
D.
ANSWER.
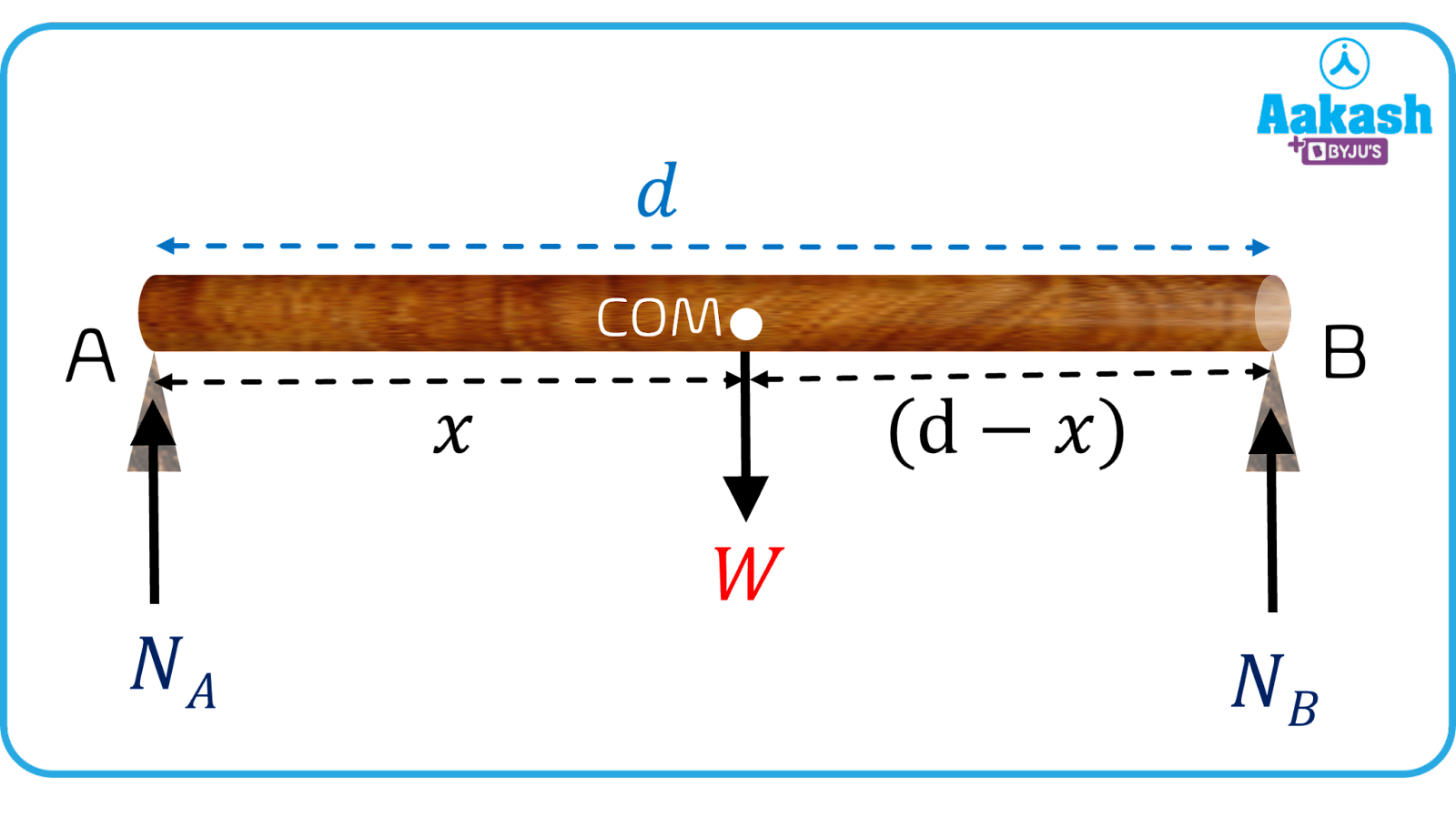
There will be two normal forces acting on the rod at its two ends, A and B. Weight W will act downwards at the centre of mass of the rod, which is located at distance x from end A of the rod of the total length, d.
As the body is in equilibrium, it satisfies the conditions for translational as well as rotational equilibria.
To satisfy the conditions of translational equilibrium, the net force on the rod should add up to zero. Therefore,
NA+NB=W ……..(i)
To satisfy the condition of rotational equilibrium, the total torque on the rod should add up to zero.
Let us consider that the torque balances at the centre of mass of the rod. Consider that the axis of rotation is passing through the centre of mass.
On adding all the torques, we get the following:
(By using equation (i))
On expanding, we get the following:
Thus, option (D) is the correct answer.
Q2. A uniform rod of length L and mass M rests against a smooth wall. Find the coefficient of friction between the ground and the lower end if the minimum angle that the rod can make with the horizontal is 𝜃.

Solution
Let 𝜇 be the coefficient of friction between the ground and the rod for which the minimum angle that the rod can make with the horizontal is 𝜃.
Friction will be maximum when angle will be minimum.
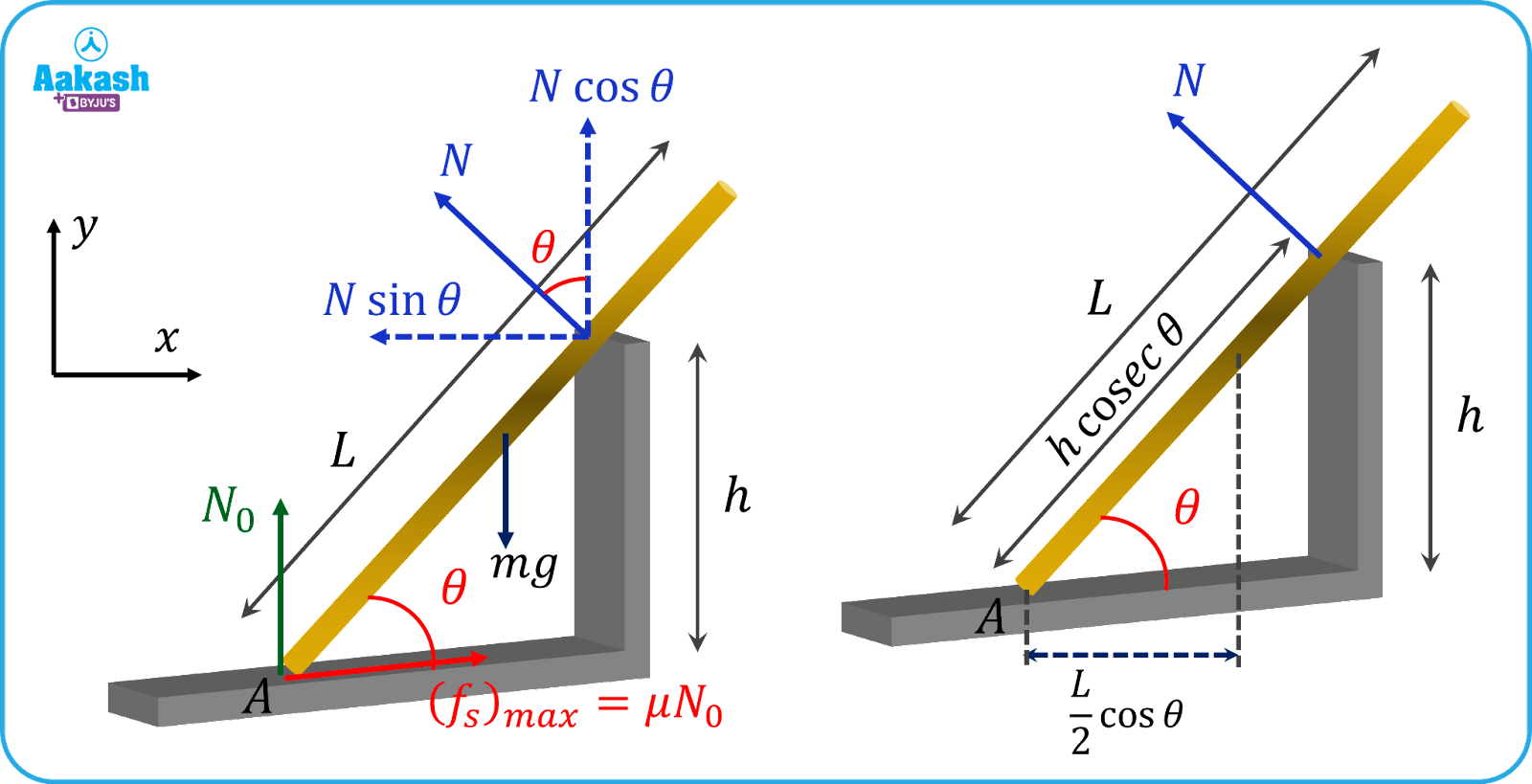
As the rod is in the equilibrium,
and
Along the x-direction,
Along the y-direction,
Substituting the value of No,
As the rod is in equilibrium, net torque acting on it is also zero.
Substituting the value of N in equation (ii),
Q3. A uniform stick of mass M and length L is suspended through two vertical strings of equal lengths fixed at the ends. A small object of mass m is placed on the stick at a distance x from the left end. Find the tensions in the two strings if the stick remains horizontal.
Answer.
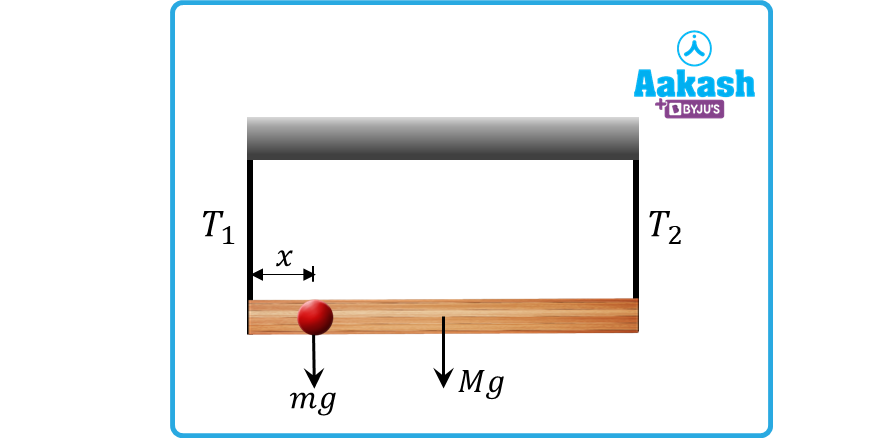
Since the stick remains horizontal, it means that the stick is in equilibrium and therefore would be in rotational equilibrium as well.
Therefore applying the condition for rotational equilibrium.
Taking moments about the point where the right string is attached.
The rod will be in translational equilibrium as well, therefore
Equating the value of T1 from equation (i),
FAQs
Q1. Can a body in rotational equilibrium rotate?
Answer: Yes a body in rotational equilibrium can rotate at constant angular velocity.
Q2. What is the importance of centre of gravity while considering rotational equilibrium?
Answer:Centre of gravity is the point where all the weight of the body can be assumed to be concentrated. While considering rotational equilibrium, one needs to take into account torque acting due to weight component. Also we can take the algebraic sum of torques about centre of gravity to be zero.
Q3. Can a body translate at variable speed but still be in rotational equilibrium?
Answer: Yes it is possible that a body can translate at variable speed but still be in rotational equilibrium if the force is applied at the centre of mass of the body.
Q4. Can a body be in translational equilibrium but not in rotational equilibrium?
Answer: Yes, a body can be in translational equilibrium but may not be in rotational equilibrium at the same time. Consider a couple being applied at the ends of a rod. The net force on the rod will be zero, hence will be in translational equilibrium. The couple produces a non zero torque and thus the rod will not be in rotational equilibrium.