-
Call Now
1800-102-2727

Elasticity - Elastic behaviour of solids

If we hammer an aluminium plate, it will get elongated and can be converted into a thin sheet. As a result of this action, we might have seen practically in your school tiffin box in which our mother wraps rotis or parathas in foil. Yes, this foil is made up of aluminium and is known as aluminium foil. Also, you have used erasers in our school life that can be stretchable in nature but when we talk about the blackboard chalk, when we put a little bit of force on it with our fingers, it breaks eventually. This phenomenon is understood by the property of the materials known as elasticity which tells us how much material is elastic. We will discuss the elastic behaviour of the solids in this topic.
Table of contents
- Elasticity
- Understanding of elasticity
- Stress and types
- Strain and types
- Hooke's law
- Bulk modulus of elasticity
- Practice problems
- FAQs
Elasticity
Elasticity can be defined as when a material is subjected to an external force then
“The ability to oppose any change in the shape or size of the body”
or
“The ability of the body to come back its original shape and size after removing the applied force, up to its elastic limit”
Therefore elasticity is the property of the material that describes the behaviour of the material when it is subjected to force.
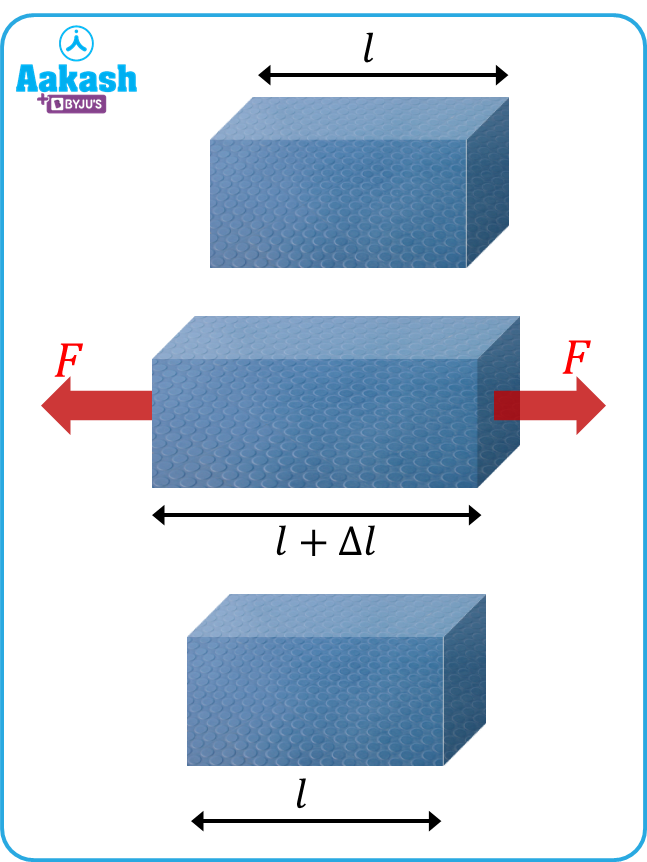
Consider a block of length l initially when no external force is applied, the block is at rest. Now, the block is subjected to a force F as shown in above the figure. The block will tend to deform. Let’s say the change in length after deformation is l. Now, if the applied force is removed, the block will try to come in its original shape and size. Then there might be two conditions that arise, i.e. either the block will regain its original shape and size or it might remain in the final shape and size which it obtained when the force was applied. If the Block regains its original shape and size completely after the removal of the external force then the block material is said to be a perfectly elastic material and when the block remains in its final state then the block material is said to be a perfectly inelastic material.
Understanding of elasticity
At the microscopic level, the cause of elasticity is intermolecular forces. Consider a system of molecules as shown in figure below in which the spring-like connections are representing
the intermolecular force between the molecules and r0 is the mean position of the molecules with respect to others which is also known as intermolecular separation.
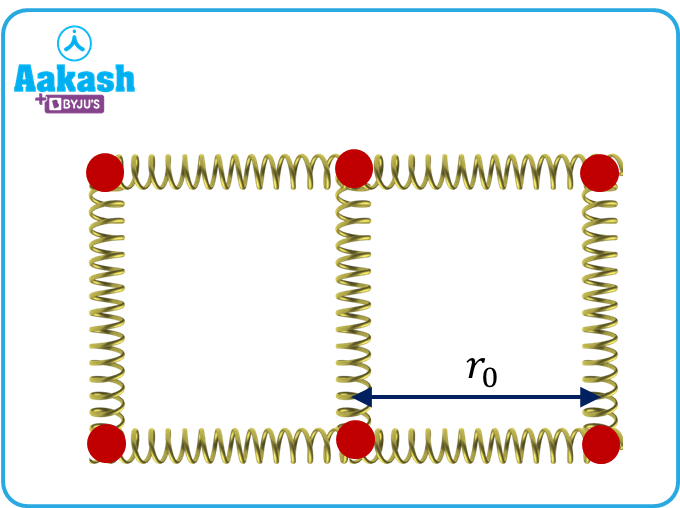
Now, if one molecule is moved from its equilibrium position or mean position, the intermolecular force will change. It will be of attraction type if the molecules are moved apart from each other and the intermolecular force will be of repulsive type if the molecules are moved towards each other. These attraction and repulsion actions finally try to bring back the molecule to its original position.
Now at the macroscopic level, these repulsive and attractive intermolecular forces become the force that opposes the external force on the body which is known as the restoring force. Because it tries the body to come to its equilibrium position when an external force is applied to it. The external force is also known as the deforming force and the change in the shape and size of the body is known as the deformation. This restoring force is equal in magnitude to the deforming force and opposite in direction to the deforming force.
Morse curve: It is the plot that shows the relationship between potential energy of the molecule (U) and the intermolecular separation (l). The plot is shown below,
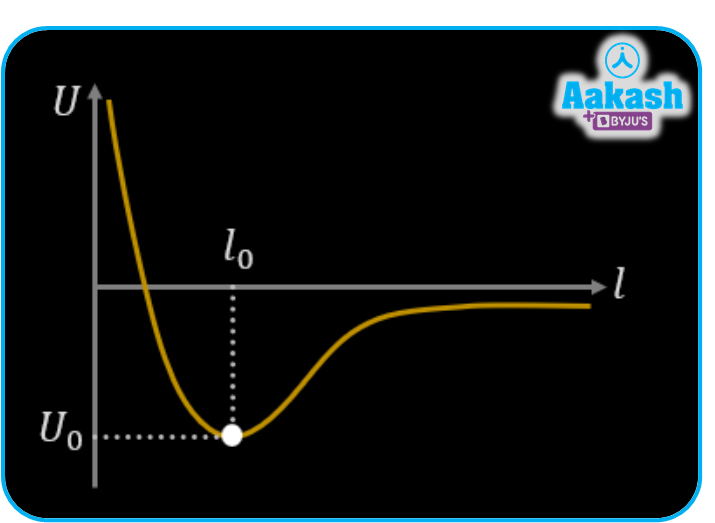
In the above graph, U0 is the minimum potential energy and l0 is the intermolecular separation between the molecules when the molecule is at minimum potential energy condition.
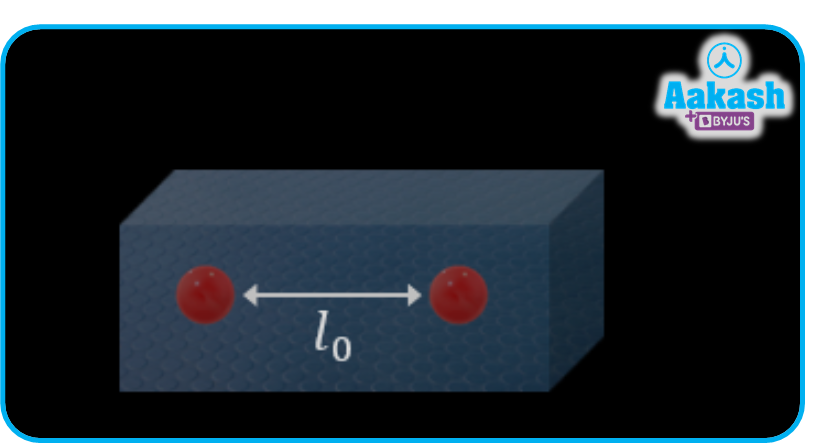
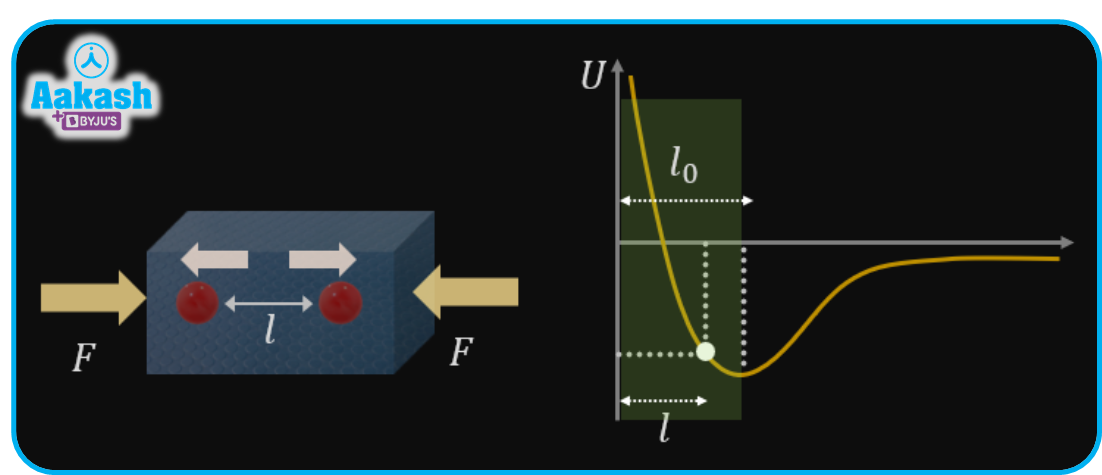
Now, considering two molecules that are present in a cuboid block where l0 is the distance between two molecules i.e., the intermolecular separation at minimum potential energy condition as shown in the below figure,
Now, there are two cases which may arise depending on the nurture of the deforming force whether it is compressive or tensile.
Case 1: When the nature of the deforming force is compressive then the molecules of the block come too close to each other as shown in below. And we know that as the intermolecular separation between the molecules decreases, the molecules repel each other hence the restoring force will be opposite to the deforming force.
Let’s say the separation between molecules is reduced to l then, l < l0.
In this condition, the resultant force will be the repulsive force as the attraction force is less than the repulsive force. And during the compression due to compressive force the potential energy increases but the point in the morse curve will lie on the left side of the minimum potential energy line therefore the zone present at the left side of the minimum potential energy line is known as the repulsion zone as shown in the figure below.
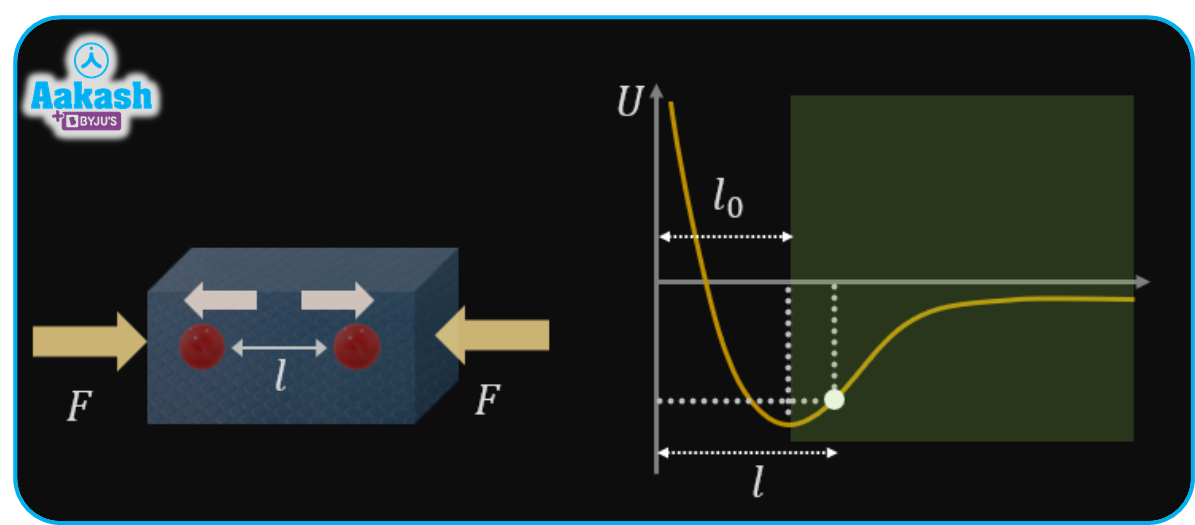
Case 2: When the nature of the deforming force is tensile then the molecules of the block are moved away from each other as shown below. We know that as the intermolecular separation between the molecules increases, the molecules start attracting each other, hence the restoring force will be opposite to the deforming force.
Let’s say the separation between molecules is increased to l then, l > l0.
In this condition, the resultant force will become the attractive force as the attraction force is greater than the repulsive force. And while applying the tensile force, the potential energy increases and the point in the morse curve will lie on the right side of the minimum potential energy line therefore the zone present at the right side of the minimum potential energy line is known as the attraction zone as shown in the figure below.
Stress and types
Deformation occurs when we apply deforming force to an object. There will be an opposing force, produced inside the object, called the restoring force. It will work to regain the object to its original size and shape. Now from Newton’s third law of motion, in case of no permanent change in the shape and size of the object, the restoring force will be of equal magnitude and in opposite direction of the deforming force. This restoring force acting on per unit area perpendicularto the direction of the force on the object is known as stress.
It is mathematically denoted by (sigma) and it is a tensor quantity as it does not follow the vector algebra laws but has a direction.
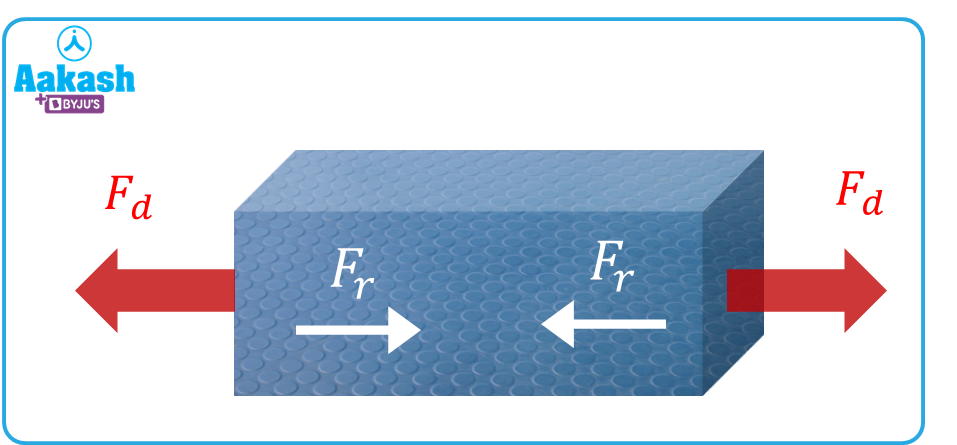
Consider a block is undergoing deformation due to a deformation force Fd acting on it. Then a restoring force Fr will be generated in the block which will be equal and opposite to the deforming force.
|Fd| = |Fr|
Now mathematically, stress is written as,
Where, Fr = Restoring force
A = Cross-sectional area of the object on which the deforming force is applied
Types of stress : Depending on the direction of deforming force acting on the body, there are mainly three types of stresses,
- Longitudinal or normal stress ()
- Shear stress ()
- Volumetric stress ()
Strain and types
When a body is subjected to a force called the deforming force, it will get deformed due to the change in the shape and size of the body. This change in the shape and size may be the change in size or in shape. Then the ratio of this change in size of the body to its original size is known as strain. Since stress is generated in the body due to the action of deforming force hence we can say that stress is the cause of creating strain in the body.
It is denoted by ε and mathematically it is expressed as,
Consider a rod of having cross-sectional area A and length L as shown in the figure. It is subjected to a deforming force along the axis, this causes a change in its length and this kind of strain is known as longitudinal strain.
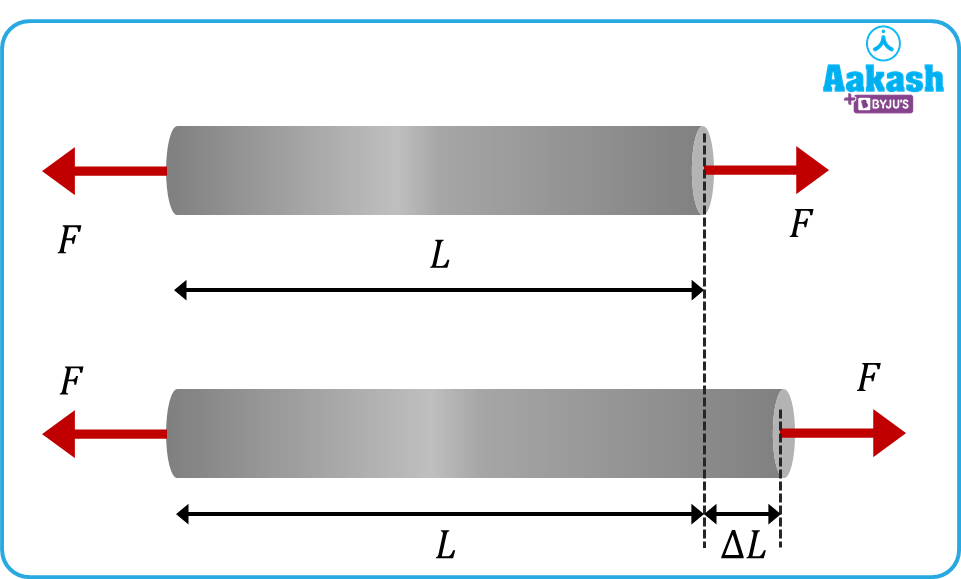
If the chance in length is L then strain in the rod is,
Types of strain: Strain is divided into 3 types,
- Longitudinal strain ()
- Shear strain ()
- Volumetric strain ()
Hooke's law
When a deforming force is acting on a body, it undergoes deformation and there will be change in shape and size in the body hence stress and strain is generated in the body. This stress and strain can relate with each other with the help of a law, known as Hooke's law. It states that,
“the strain (ε) produced in the body due to change in shape and size is directly proportional to the stress () produced in the body within the elastic limit”
Mathematically, the law is represented as,
Now if we remove the proportionality then a proportionality constant comes into the picture which is known as the modulus of elasticity and represented by Y.
Hence the equation (i) is modified as,
Here the modulus of elasticity, Y is the property of the material of the body and does not depend on stress and strain. It is also known as the Young’s modulus of elasticity.
As seen from the above equation, if we want to draw a graph between stress and strain then it will be a straight line within the elastic limit but after the elastic limit, the material behaves like plastic material and will not come to its original shape and size when the external force is withdrawn. This relationship is understood by a plot between stress and strain, known as the stress-strain curve. The stress-strain curve with nomenclature is shown below,

Bulk modulus of elasticity
Bulk modulus of elasticity: Bulk modulus is defined as the ratio of normal stress or change in pressure to the volumetric strain in the body. Bulk modulus is the measure of mechanical properties of solids, liquids and gases but it becomes more significant in liquids and gases as the bulk modulus for the solids is much larger than liquids and gases.
Bulk modulus
Mathematically it is expressed as,
Where,
 Volumetric strain in fluid
Volumetric strain in fluid
The negative sign shows the increase in pressure and decrease in volume.
Practice problems
Q. A block of cross sectional area 4 mm2 is subjected to a force with a magnitude of 100 N. Calculate the stress generated in the block due to that force.
A. Given, cross-sectional area of the block,
Applied force, F=50 N
Then the stress produced in the block,
Q. A rod of diameter 6 mm and length 3 m is subjected to a load of 250 N perpendicular to its cross-section. If the final length of the rod after elongation due to applied load is 3.1 m, then find the longitudinal strain in the rod.
A. Given, Diameter of the rod,
Applied load, F = 250 N
Initial length of the rod, l1 = 3 m
Final length of the rod, l2 = 3.1 m
Then the change in length will be,
Hence the strain in the rod is,
Q. Calculate the Young’s modulus of elasticity of the material of the rod of length 1 m and diameter 3 mm if the strain produced in the rod due to 150 N of load is 0.4.
A. Given, Diameter of the rod, d = 3 mm = 3 10-3 m
Length of the rod, l = 1 m
Applied load on rod, F = 150 N
Strain in the rod, ε = 0.4
Then cross-sectional area of the rod,
Now from Hooke’s law of elasticity
Where,
Then the Young’s modulus of the material of the rod,
Q. Upto what depth a ball should we take into a water lake so that its volume is decreased by 0.5 %? The bulk modulus of the ball is 1000 MPa. (Take g=10 m/s2)
A. Given, the volume is decreased by 0.5 % then the volumetric strain will be
Bulk modulus of elasticity of the ball,
The bulk modulus is formulated as,
If the required depth of the ball is h then the change in pressure exerted on the ball at that depth is given by,
Hence form equation (i),
FAQs
Q. Which material has more elasticity, steel or rubber?
A. From Hooke’s law of elasticity we can see that the modulus of elasticity is inversely proportional to the change in the length of the material when it is subjected to a fixed amont of external force. Therefore the materials that have more change in length, will have less value of modulus of elasticity. Since steel has more ability to resist any change in its length under an external force than rubber, we can say that steel is more elastic than rubber.
Q. What do you mean by the rigid body and real body?
A. When a deforming force is applied to a body then if the shape and size of the body do not change then the body is known as the rigid body. A rigid body is also known as the ideal body or ideal system.
When a deforming force is applied to a body then if the shape and size of the body change then the body is known as the real body. A real body is also known as the real system.
Q. What would a perfectly rigid body's Young's modulus be?
A. As we know that there will be no deformation occurring in a perfectly rigid body when it is subjected to a deforming force therefore Young’s modulus of a perfectly rigid body is said to be infinite.
Q. What are the properties of Young’s Modulus of elasticity?
A. The properties of Young’s modulus of elasticity are as follows:
(1) Young’s Modulus depends on the nature of the material, different materials have different values of Young’s Modulus.
(2) It is defined only for solids, not for liquids and gases. Liquid and gases don’t resist strain.
(3) If we say material A has Young’s Modulus larger than Young’s Modulus of material B then material A is said to be more elastic than material B. For example, rubber is less elastic than iron but we use to describe it in just the opposite way in our daily life.
(4) A perfectly rigid body has an infinite value of Young’s Modulus.